基于dsPIC33FJ128MC506的CAN通信(07-100)
C1CTRL1bits.REQOP=4;
while(C1CTRL1bits.OPMODE!=4); //请求进入配置模式
ecan1ClkInit(); //调用波特率设置函数
C1FCTRLbits.DMABS=0b000; //在DMA RAM 中设置4个CAN报文缓冲
ecan1WriteRxAcptFilter(1,0x36,0,2,0); //配置接过收滤寄存器
/*配置接收屏蔽寄存器,要注意的是,这里设为“1”的位是非屏蔽位,设为“0”的位为屏蔽位。这里的0x7FF将会对标准帧ID的每一位都进行检查是否对应的过滤器相匹配*/
ecan1WriteRxAcptMask(0,0x7ff,0);
C1CTRL1bits.REQOP=0;
while(C1CTRL1bits.OPMODE!=0); //进入正常模式
/*以下语句设置CAN报文的发射接收控制*/
C1RXFUL1=C1RXFUL2=C1RXOVF1=C1RXOVF2=0x0000;
C1TR01CONbits.TXEN0=1; /*ECAN1的0缓冲器为发射缓冲 */
C1TR01CONbits.TXEN1=0; /* ECAN1的1缓冲器为接收缓冲 */
C1TR01CONbits.TX0PRI=0b11; /* 发射缓冲的优先级*/
}
数据的发射和接收
写报文ID
下面的函数将一个报文ID写到ECAN1的发射缓冲区,其中各个参数代表的含义如下:
/*buf -> 发射寄存器号
txIdentifier ->发射报文的ID
ide -> "0" 报文为标准帧
"1" 报文为扩展帧
remoteTransmit -> "0" 报文为正常报文
"1" 报文为远程报文 */
void ecan1WriteTxMsgBufId(unsigned int buf, long txIdentifier, unsigned int ide, unsigned int remoteTransmit)
{
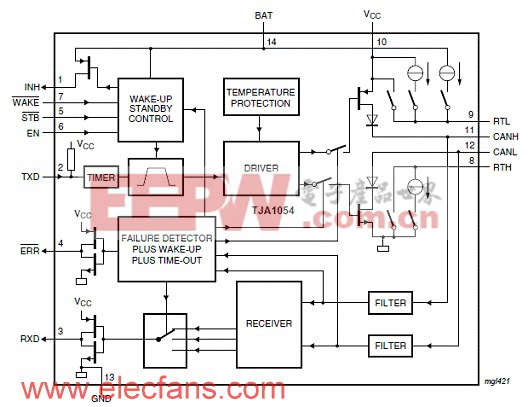
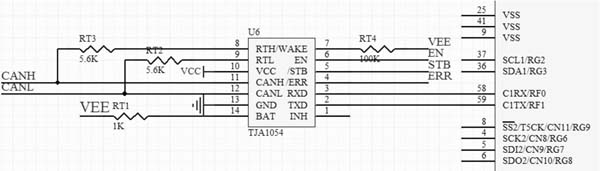
关键词: CAN TJA1054 dsPIC33FJ128MC506

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码