基于CompactRIO的发动机连杆疲劳试验系统研究
当为静载试验时,只控制液压缸向一个方向运动,拉伸加载时负半轴都为0;压缩加载时正半轴都为0。
3.2.1.3加载载荷PID控制
PID主要针对动态疲劳试验而言,本试验系统采用常规的PID控制方法。加载载荷为循环非对称拉压载荷,要保证加载载荷达到所设定最大拉伸和压缩载荷值,则最大拉伸载荷和最大压缩载荷即为PID控制的目标值;同时系统采集连杆试件承受拉压载荷信号,并将最大值最为PID控制的反馈量。控制原理如图8所示。
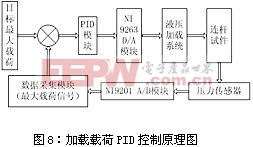
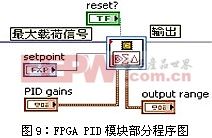
图9为LabVIEW中的FPGA PID控制模块部分程序图,该模块大大简化了控制过程。只需要设定好各个接口参数,然后将反馈信号连入process variable端口,就能得到相应的输出。
加载载荷PID控制仿真如图10和11所示。图10列出对该PID控制模块各参数的设定(PID参数调试过程此处从略)。设定完毕后,将PID模块的Setpoint由0变为14.3,得到响应特性如图11所示。时间单位为每刻度50ms,在,Setpoint(红色)较大变化的情况下,Process Variable(蓝色)在3s内达到Setpoint并保持稳定。
仿真结果说明加载载荷PID控制满足试验系统的要求。同时,响应特性可以通过改变PID参数进行调节。

3.2.2试验状态的监控
试验状态的监控主要包括疲劳破坏、加载载荷和安全故障三个部分。
3.2.2.1疲劳破坏的监控
疲劳破坏的监控,主要根据CompactRIO 9237模块采集连杆试件相应位置的应变,在监控面板上实时显示应变波形和峰谷值。当超出设定范围并超出设定范围次数达到设定值时,判定连杆发生破坏,试验自动暂停,试验人员进行检查。
关键词: NI LabVIEW CompactRIO

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码