转差频率矢量控制的电机调速系统方案
鉴于直接转子磁场定向矢量控制系统较为复杂、磁链反馈信号不易获取等缺点,而转差频率矢量控制方法是按转子磁链定向的间接矢量控制系统,不需要进行磁通检测和坐标变换,并具有控制简单、控制精度高、具有良好的动、静态性能等特点。在分析其控制原理的基础上,应用 Matlab/Simulink软件构建了转差频率矢量控制的异步电机调速系统仿真模型,并通过各模块闽的参数配合调节与优化,对其进行了仿真分析。仿真结果验证了,采用转差频率矢量控制的调速系统具有良好的控制性能。
引言
基于转差频率控制的矢量控制方式是在进行U/f恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对输出频率f进行控制的。采用这种控制方法可以使调速系统消除动态过程中转矩电流的波动,从而在一定程度上改善了系统的静态和动态性能,同时它又具有比其它矢量控制方法简便、结构简单、控制精度高等特点。
Simulink仿真系统是Matlab最重要的组件之一,系统提供了标准的模型库,能够帮助用户在此基础上创建新的模型库,描述、模拟、评价和细化系统,从而达到系统分析的目的。
1 转差频率矢量控制系统
1.1 数学模型
转差频率矢量控制是按转子磁链定向的间接矢量控制系统,不需要进行复杂的磁通检测和繁琐的坐标变换,只要在保证转子磁链大小不变的前提下,通过两相同步旋转坐标系(M-T坐标系)上的数学模型运算就可以实现间接的磁场定向控制。其控制的基本方程式如下:
电压方程:
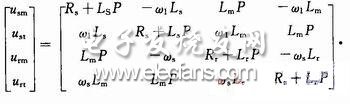
式中:usm,ust,urm,urt为定、转子在M-T轴上的电压分量;Ls为定子自感;Lr为转子自感;Lm为定、转子互感;ω1为定子角频率、ωs为转差角频率;P为微分算子;Rs,Rr为定、转子电阻。
磁链方程为:
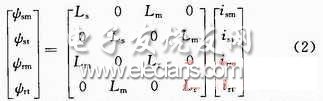
式中:ψsm,ψrm为定、转子磁链励磁分量;ψst,ψrt为定、转子磁链转矩分量;
M-T坐标上的电磁转矩方程:
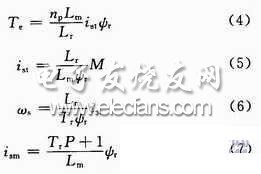
式中:np为转子极对数;Te为电磁转矩。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码