计算机控制智能小车的软件设计
MOV B,#100 MOV A,B MOV A,#1
MOV B,#100 MOV B,#10 MUL AB
DIV AB DIV AB MOV 3CH,A
MOV 3EH,A MOV 3DH,A MOV A,3EH
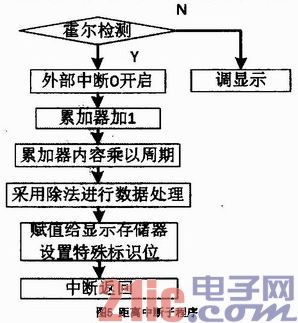
来进行换存储,同时送到显示部分进行显示。
2.1.5 下位机查询、发送数据和接收数据程序设计
在软件设计时一定要注意单片机与PC之间应该遵守相同的协议,其主要包括波特率、传输帧格式、校验位等。除些之外,如果要实现PC机与单片机的通信,PC机还应该向单片机发送欲寻单片机的编码,而单片机中要编写地址识别程序段。本文的通信协议约定如下:1)波特率:1200B/S;2)帧格式:1位起始位,8位数据位,1位停止位,无奇偶校验;3)传送方式:PC机采用查询方式收发数据,51单片机用中断方式接收数据,查询方式发送数据;4)数据长度:1字节;校验方式:累加和校验;握手方式:软件握手。
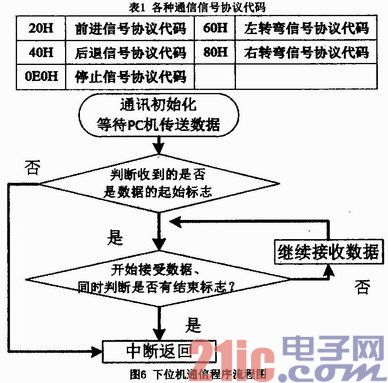
下位机通信程序流程图如图6所示。本设计实现一个简单的通信过程,它是由上位机控制下位机(智能小车)运行,即由上位机发送不同的通信信号协议代码(如表1所示),下位机接收到相对应运行通信信号协议代码后下位机程序执行相对应的运行程。
2.2 系统的上位机程序设计
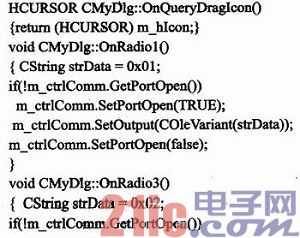
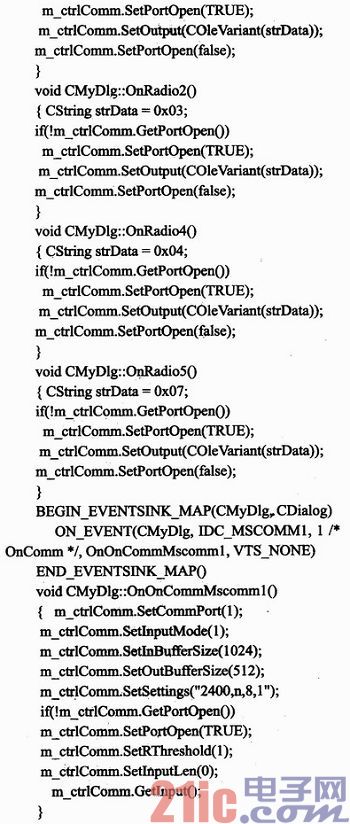
上位机通信部分控制的上位机软件采用VisualC++(简称VC)编程,上位机设计需要提供一个控制界面,再通过简称VC编程,而使用VC具有强大功能的通信控件MSCOMM,该控件可对串口状态及串口通信的信息格式和协议进行设置,直接利用PC机的串口发送数据。为实现单片机与PC机的可靠通信,须保证双方具有相同的数据格式和波特率。而上位机与下位机通过协定的特定通信协议进行通信。
3 结论
计算机控制智能小车,本文在软件方面基本能够实现设计任务的要求,能够从起点沿引导线行驶到终点,并在到达终点时能够自动停止行驶;在行驶的过程中能检测到铁片且发出声光提示,然后继续行驶;同时能实时交替显示检测到铁片的个数、行驶的距离和行驶时间;且在停车时能交替显示总程检测到铁片的个数、行驶的距离和行驶时间。本设计的扩展部分有:下位机可设置相应的控制开关来控制小车行驶的周期、时间长短、行驶距离和小车行驶转弯的角度等;上位机部分可设置时间显示、检测到铁片的个数、行驶的距离和行驶时间等的控制显示界面窗口。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码