PSoC4试用报告 控制步进电机驱动器的模拟实验
计流程。
五、硬件连接
1、UART 的P0.5、P0.4联接到the PSoC 5LP UART bridge 的P12.6 、P12.7。
2、外接的器件,须联接到套件的GND、P0.0、P0.7、P1.0、P2.0等管脚。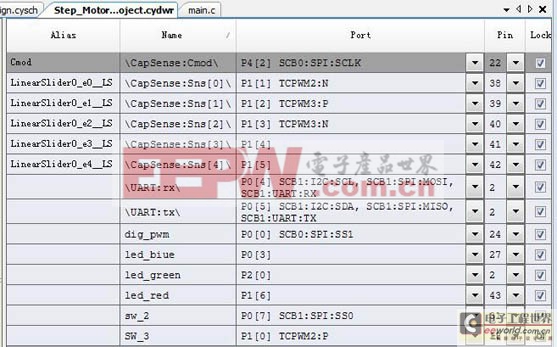
六、调试
1、将电源跳帽插入+5V端,系统由+5V供电。
2、在PSoC Creator 2.2中,经Build和Program后,按动按钮SW2(在CY8CKIT-042板上)、SW3(外接),滑动触摸条,观察CY8CKIT-042板上RGB 的LED蓝灯和绿灯、指示灯D_4(外接)和反映脉冲变化指示灯D_1(模拟外接)的变化。开通电脑的putty,观看转速RPM,在putty显示如下变化:

七、心得体会
在PSoC Creator 2.2平台里,即能作图,又能编程,显得图文并茂,新颖别致;套件里的组件,可以独力使用,显得与其它单片机不同的地方,体现了所要介绍的卓越的性能。
在本模拟中,使用了本套件不少的组件,一些在内部进行有机嵌入组合,且不需要软件编程,简化了设计过程、降低了设计了成本,优化了电路。
在本实验中,仅仅模拟了驱动器驱动步进电机控制转动正反转方向、启动电机和反映转速快慢的脉冲的变化,是一个简单模拟实验。至于使用还需要根据具体的步进电机和驱动器数据参数,进行详细的编程设计;在电机工作不超载的情况下,电机的转速,根据步距角确定电机转动一周所需的脉冲数及计时出发出这些脉冲所需的时间,通过软件编程计算和通讯,将转速RPM显示在终端显示器上,这想在以后实用过程中再做。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码