PSoC4试用报告 控制步进电机驱动器的模拟实验
一、概述
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角 。它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器 。
步进电机驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
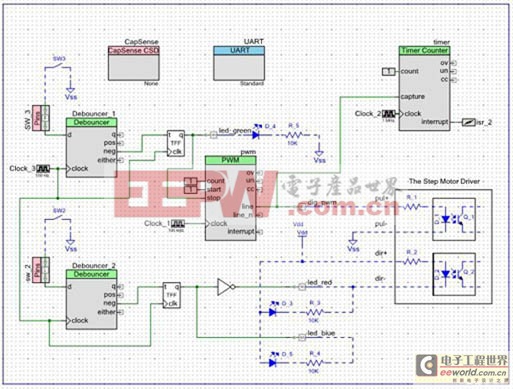
基于以上叙述,可以利用CY8CKIT-042板上CY8CKIT-42的组件CapSense 和PWM组合作用,输出变化的脉冲,作用于驱动器,控制步进电机转动;可以利用防抖Debouncer 和触发器TFF形成电路,产生数字开关量,作用于驱动器,确定步进电机转动方向。

二、原理叙述
1、确定步进电机转动方向
按动按钮SW2(在CY8CKIT-042板上),经过防抖Debouncer_2 、触发器TFF和非门,产生“1”、“0”信号,作用于驱动器“dir+ 、dir-”,来改变步进电机转动方向。这用CY8CKIT-042板上RGB 的LED蓝灯和红灯分别亮、灭,进行模拟区分是正转、还是反转。
2、步进电机启、停和调速
按动按钮SW3(外接),经过防抖Debouncer_1 、触发器TFF,作用于指示灯D_4(外接),绿灯亮、灭表示步进电机启动、停止。
指示灯D_4(外接)灯灭,表示下降沿触发启动脉冲调制器PWM,产生脉冲信号,作用于驱动器“pul+ 、pul-”,步进电机转动。利用PSoC 4开发套件的容性触摸感应CapSense组件和脉冲调制器PWM组件的作用,通过滑动触摸条,产生变化的脉冲信号,达到调速的目的。这里,利用红色指示灯D_1(外接)的亮度变化来模拟脉冲信号的变化。
3、步进电机转速的显示
根据步进电机的步距角,确定转动一周所需要的脉冲数和计时计数器timer计时,计算转速RPM,其值经过软件处理,通过 UART 和the PSoC 5LP USB-UART bridge传送 ,显示在电脑的putty上。三、所需的组件
本模拟采用本套件以下组件,组件的配置见附件:Step_Motor_Project图片.zip
· CapSense
· UART
· PWM
· Timer Counter
· CyTFF
· Debouncer
· CyClock
· CyPins
· 非门
四、软件
软件main.c包括本例软件设

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码