一种可变形飞行器的无人机控制系统设计与实验
3.2 传感器
系统采用三对红外姿态传感器判断自身姿态。其原理如图5所示。
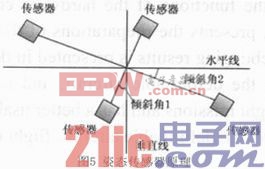
由于天空和大地之间的温差,它们的红外辐射波长有差别。系统采用的红外传感器对8~15μm波段的红外辐射敏感,这正是天空和大地的一般热辐射波长,因此传感器不会被过热(如太阳)或过低温度的物体影响。由一对热电堆产生的反向电压经过放大器放大,再经过模数转换,即可显示为代表无人机某一方向姿态角的数值。
一般采用三对红外传感器。其中垂直方向传感器的作用是初始化天空与大地的温差,以确定水平方向传感器的计算比例。水平方向则有横向和径向两对传感器,分别计算滚转和俯仰角度。
3.3 GPS
全球定位系统GPS采用LEA-5H,它的体积小、性能好,位置更新频率为4Hz。LEA-5H与系统串行接口相连,获取无人机的飞行速度、高度、经纬度等信息实现实时导航控制。
3.4 调制解调器
调制解调器采用Digi的XBee模块,XBee的双向链路给飞行中的调整、导航指令传输和飞行状态反馈提供通道。XBee的射程达到40km,所有型号的引脚兼容,和天线一起重量约为2g。
3.5 遥控模块
遥控模块包括遥控指令发送机和接受机。遥控指令发送机采用Spektrum DX-7,接收机采用FutabaFASST 7-channel接收机。发送机发送遥控指令,接收机接收遥控指令,并将指令传送给系统芯片。
4 软件
软件架构采用基于UML语言的仿真软件。UML可以对任何具有静态结构和动态行为的系统进行建模, 能够应用于软件系统开发从需求分析到软件测试的各个阶段,适用范围极广。
4.1 飞行仿真配置
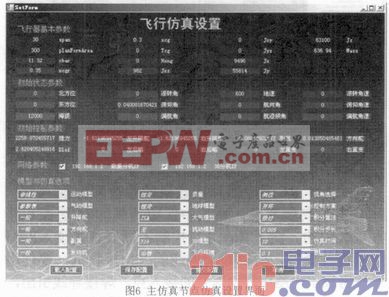
飞行器在实际飞行前需要验证飞行算法,对飞行仿真进行相应的配置,如图6所示,主要分为四大部分:飞行器基本参数、初始状态参数、初始控制参数、模型与仿真选项。
4.2 飞行仿真平台
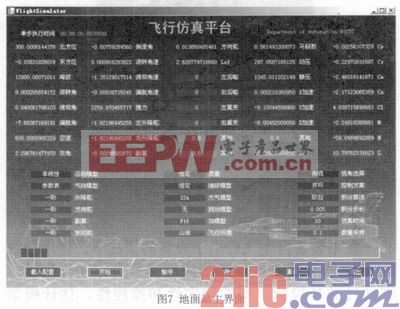
飞行仿真平台实时观测飞行器的位置、俯仰角、滚转角、偏航角等信息。平台负责飞行中对无人机进行实时控制和监测。
5 控制规律选择与设计
工程实际中PID控制器应用最为广泛,本设计采用PID控制器。
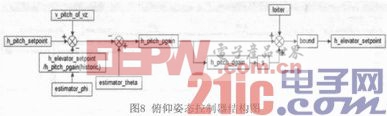
5.1 俯仰姿态控制回路
俯仰姿态控制回路保证飞行器俯仰角在扰动后能以一定的性能保持或者稳定到给定值。该控制回路由俯仰角反馈回路和俯仰角速率反馈回路构成。
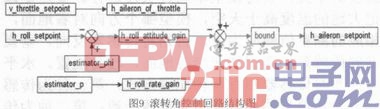
5.2 滚转角控制回路
滚转角控制回路的主要作用是当飞行器飞行过程中受到外力时,能够使飞行器保持固有的滚转角的控制,飞行器改变方向时也需要滚转角控制回路的辅助配合。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
