多功能智能室内定位导航仪设计案例
三、方案设计
3.1 系统功能实现原理(除图片外需有文字介绍)
3.1.1定位实现方法:
STEVAL实验板提供LSM303DLH(六轴地磁模块)和LPR430AL(两轴横滚俯仰陀螺仪) LY330ALH(一轴偏航陀螺仪),利用六轴地磁模块中的三轴加速度传感器测量间隔一定短时间间隔后的相对板平面的加速度 ,并且利用
,并且利用  ,并且进行累加,可以得到在不同时间相对于板平面的速度 ,然后利用陀螺仪可以测量的加速度对以上的速度进行变换,从而得到在真实空间中的三个方向的速度分量(以竖直向上为z轴正方向,x,y可以具体定义,满足三维直角坐标系关系)。考虑到角度量
,并且进行累加,可以得到在不同时间相对于板平面的速度 ,然后利用陀螺仪可以测量的加速度对以上的速度进行变换,从而得到在真实空间中的三个方向的速度分量(以竖直向上为z轴正方向,x,y可以具体定义,满足三维直角坐标系关系)。考虑到角度量 是标量,但是无穷小量
是标量,但是无穷小量 是矢量,那么可以利用公式
是矢量,那么可以利用公式  得到在较短时间内的坐标系沿三个方向的旋转变换(在实际中利用很短的时间来替代)
得到在较短时间内的坐标系沿三个方向的旋转变换(在实际中利用很短的时间来替代) 。
。
坐标系转换公式:


其中 分别是沿x,y,z三个方向在短时间内的转过的夹角,不断的利用以上转换公式可以得到当前实验板坐标系和真实空间坐标系的转动关系,利用
分别是沿x,y,z三个方向在短时间内的转过的夹角,不断的利用以上转换公式可以得到当前实验板坐标系和真实空间坐标系的转动关系,利用 可以逆向推导出
可以逆向推导出 ,(在真实空间坐标系中的三个速度分量),再利用这三个速度分量可以计算出位移,从而实现在定位。
,(在真实空间坐标系中的三个速度分量),再利用这三个速度分量可以计算出位移,从而实现在定位。
3.1.2导航实现方法:
由于具体路线的计算都集中在手机中,而传感器部分仅负责信息的采集,而手机的计算,显示功能都十分的强我们可以将比较复杂的地图和算法应用在手机中。
而Android手机一般是大屏幕触摸,终点确定,位置校准都很方便,导航是需要有点考虑的地方。
我们的地图在手机的存储中分为两层,底层存储的是地图的拓扑结构,可以根据如今的位置,使用最短路径算法等路径算法找到要提示的行进方向。而顶层存储的是地图的显示路径,可以在屏幕上进行显示并进行引导。而在行进过程中也要通过传感器确定使用者的运动方向和位置进行实时计算,提示出最新的引导方向。
3.1.3 RFID校正:
由于系统是开环系统,定位的方法利用加速度计算位移,角速度确定转动方向的方法来最终获取位移信息从而获得位置信息,但是在实际中会出现以下问题:1、线加速度和角速度的获取是间隔采样获得 2、实际情况中采用的是差分求和而不是积分会引入误差 3、在获取转动方向的时候默认 等价,但在实际中不等价,因为宏观的角度并非矢量4、传感器本身误差的存在
考虑到误差随着时间和位移的积累会大到有明显影响,所以需要进行校正:1)射频标签来进行校正:在室内的固定地点放入射频标签,实验板上加入RFID reader模块,当到达指定地点是,用户可通过刷卡形式进行校正。在进一步设计中可以考虑使用在固定地点放入大功率信号发射器,在用户路过时自动接收信号进行校正。
2)人工校正:用户可以通过手机在观察到特定位置后可以自行校正,在比较容易识别的特殊位置,用户可以通过触屏进行校正,从而辅助射频校正,实现更好的校正效果

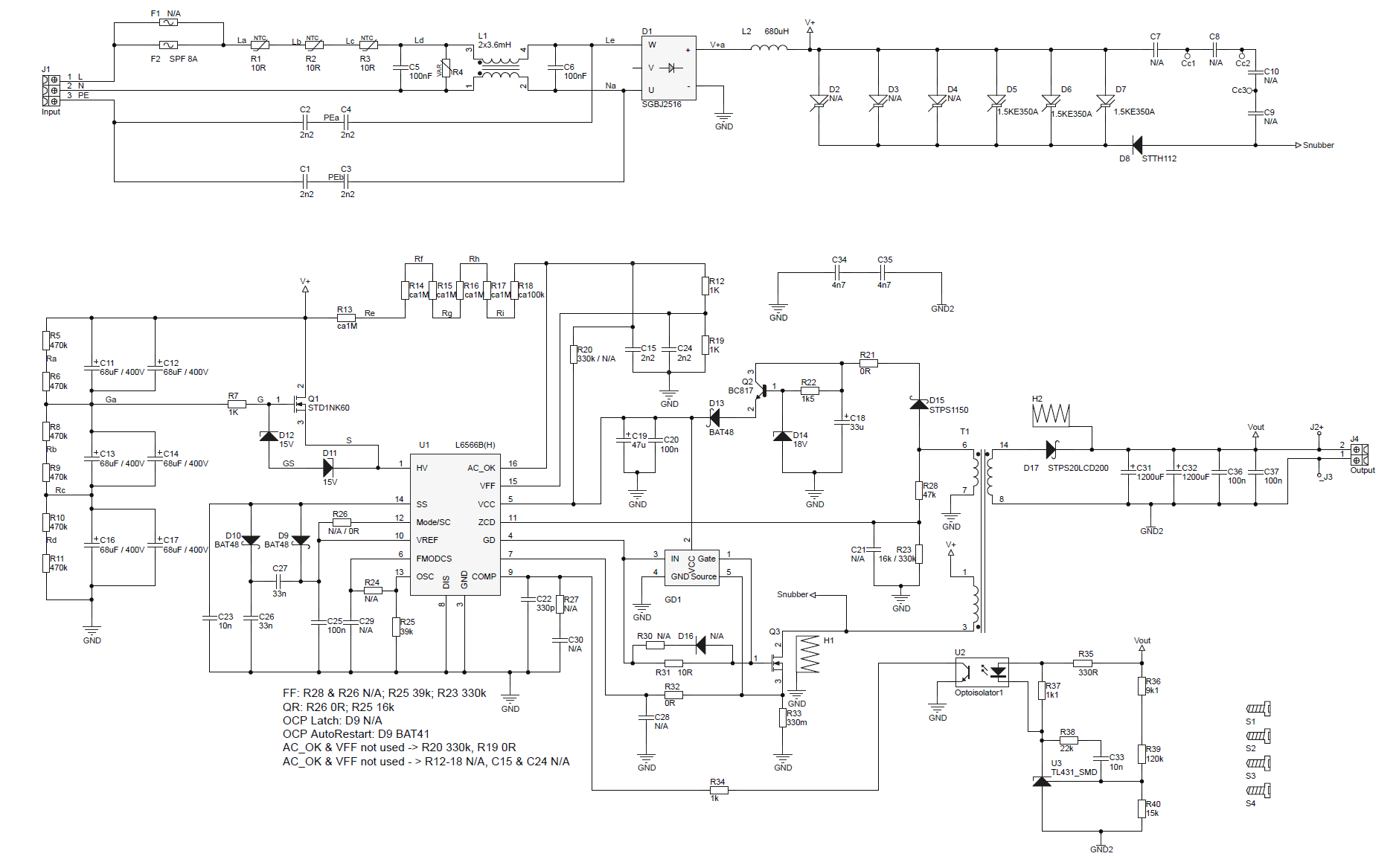
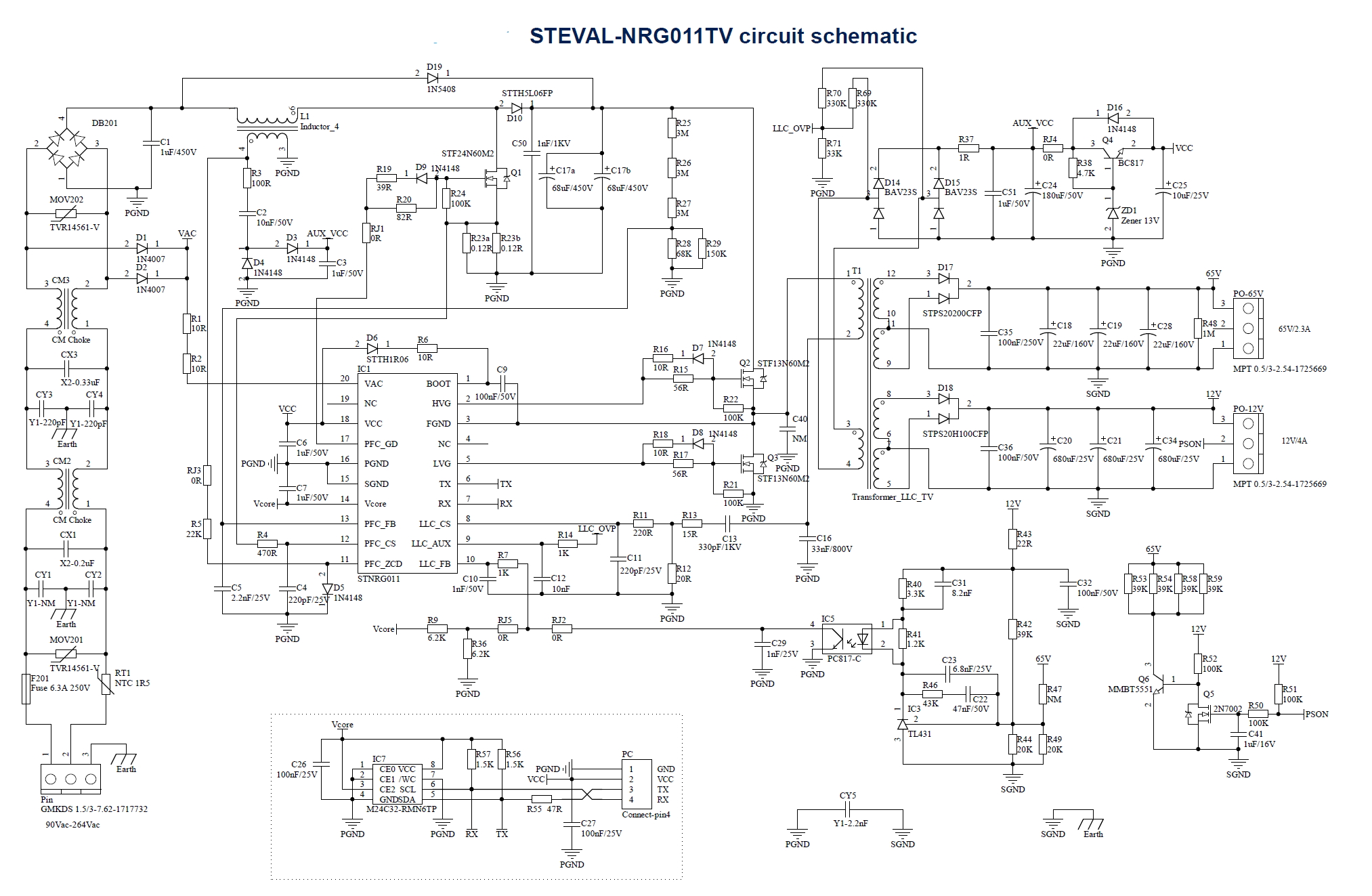
图3.1.1 硬件架构图
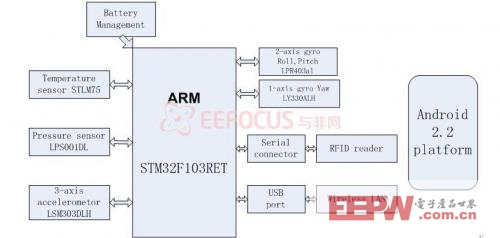
图3.1.2 系统硬件结构框图
关键词: 室内定位 导航仪 iNEMO STEVAL-MK1062V2 三轴陀螺仪

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码