探测机器人煤矿井下地图创建
3.3井下地形特征感知与描述
综合查阅了关于非平整路面立体视觉重建的相关文献,多名研究人员提到关于立体视觉匹配的不确定性对高程地图创建的影响,这些不确定性主要来自标定误差,匹配误差与量化误差,以及栅格地图造成的信息损失带来的误差。特别的,在匹配误差和标定误差未知的情况下,重建误差与场景离摄像机的距离有很大关系,文献【161.Miura,J.,YNegishi,andYShirai.MobileRobotMapGenerationbyIntegratingOmni-directionalStereoandLaserRangeFinder.in1ROS,PP.250—255,2002.】指出,重建的高程误差随着离传感器系统的距离成递增趋势。
经过研究与分析,刘提出尽管运动在非平整路面的移动机器人会由于颠簸会引起观测当中的绝对高程不一致,但在一定范围内的相对高程保持不变,且相对不确定度更小。重建后地形具有的这种性质称为地形的相对不变形,而基于高程地形某邻域内相对高程提取的环境特征称为地形的相对不变特征。也就是说,这类地形特征不随着车体颠簸而改变。虽然在车体颠簸过程中,感知到的同一地形的绝对高程时时在变,但一定范围内的相对高程落差保持不变,地形具有这种相对不变性对于稳定地确定不可通行区域具有重要意义。
3.3.1地形起伏度的检测
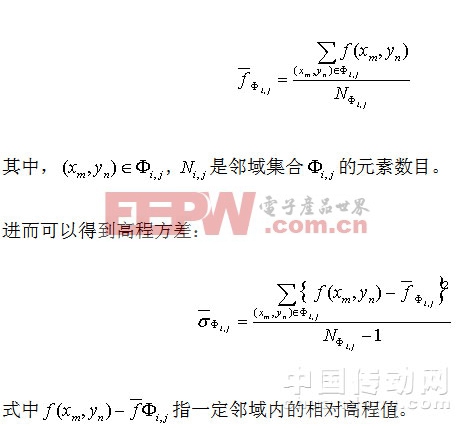
地形的起伏度是反映指定区域内某点邻域内的高程偏离该邻域平均高程的幅度,起伏度的计算可以通过计算该邻域内方差的值来描述。以(xi,yi)为中心,△d为半径的邻域Φi,j内,高程方差可以由下列公式表达:
首先计算指定点邻域内的高程均值,即:
3.3.2提取地形坡度
同一地形的起伏度具有相地面上某点的坡度表示地表面在该点倾斜程度的一个量,既有大小又有方向,是矢量。坡度矢量从数学上讲,其模等于地表曲面函数在该点的切平面与水平面夹角的正切,其方向等于在该切平面上沿最大倾斜方向的某一矢量在水平面上的投影方向,即坡向。可证明:任一斜面的坡度等于它在该斜面上两个互相垂直方向上的坡度分量的矢量和。在高程图上,坡度反映了地形高程值在某个方向的变化率。GIS中,坡度的计算方法可归纳为五种:四块法、空间矢量分析法、拟合平面法、拟合曲面法、直接解法。一般认为,拟合曲面法是求解坡度较好的方法。位置(i,j)处的坡度数值计算方法采用曲面拟合的数值解法,一般采用二次曲面。
3.4井下重要地形目标分类与描述
3.4.1阶梯的识别
在井下的各种环境中也存在着阶梯形式的地形——台阶,阶梯地形的检测也是非常重要的,在井下的通道内,自主导航机器人如果遇到阶梯地形时,由于阶梯数太多而将其识别为不可翻越的障碍时,可能会错失一个较好的路径,严重时(当只能通过台阶继续前进时)会导致任务失败,机器人停滞不前。
类似台阶的这类地形最为显著的特征是具有一组相互平行的直线边缘,因此最为直接的检测方法就是边缘检测(提取出图像中的直线特征)。由于井下环境与地面环境的不同,对台阶等类似地形的检测也采用多传感器融合的技术(立体视觉传感器和热外成像仪传感器)。
由于视觉传感器精度和范围的限制,在机器人探索过程中,直接对远距离景物进行直线特征的提取精确度不高,对台阶等检测效果不明显,但是可以预先进行对景物的纹理检测。本文采用了Gabor滤波器作为检测算法来检测图像中是否存在台阶等类似景物的疑似物,并确定其在图像中的位置。
Gabor滤波器的设计需要确定其频率参数和方向角。由于阶梯型景物是一种具有平行直线的特殊地形和Gabor滤波器的自身性质可知,在存在阶梯地形的区域,垂直方向上(90°)Gabor滤波器的产生的响应最强,相反在水平方向上(0°)滤波器的产生的响应最弱。根据这一特性,选用一系列不同的频率对图像(来自立体视觉的数据图像)在水平和垂直方向滤波,得到Gabor滤波器的最佳频率参数(使在水平方向上响应最弱,在垂直方向上响应最强),如图4所示。
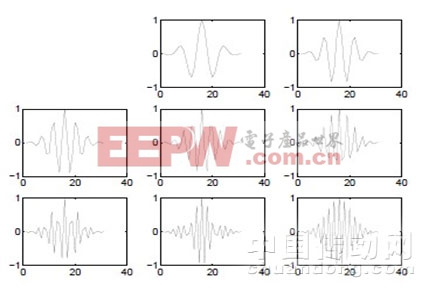
图4(在8~36Hz不同频率的响应,步长为4)
以确定频率参数的Gabor滤波器就可以对远距离景物实施纹理检测。但是由于在井下环境中,可能存在于阶梯类似的纹理(例如,采矿时留下的规则痕迹等),会对阶梯的检测产生干扰。
当机器人距离纹理检测到的疑似阶梯景物较近时,可以对其实施边缘检测,进一步确定是否是阶梯。由于井下恶劣的环境,机器人照明系统等因素,往往得到的边缘是模糊的,间断的,有一簇彼此相互连接的点集组成。本文采用了Canny边缘检测方法,如图5所示。其有三大优点:对弱边缘也有较强的响应,能够保证良好的定位和确保每个边缘只检测一次。基于以上准则的canny边缘检测算法如下:
1)图像使用带有指定标准差σ的高斯滤波器平滑,以减少噪声;
4)最后,将连接的弱边缘像素集成到强像素,实现边缘连接。
在Canny算法的实现上同样面对参数选择的问题,这里要指定低阈值Tl、
高阈值T2以及高斯滤波器的标准差σ。其中,σ是一个尺度参数,指出在多大的距离内两条平行边缘将重合成一条边缘。

(a)原始图像(b)Canny边缘检测
图5Canny边缘检测
在边缘检测的基础上采用Hough变换,实施边缘的提取,对边缘连接。通过Canny边缘检测和Hough变换边缘提取,进一步提高了对阶梯的检测精度。如图6所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码