基于AT89S52单片机的双模糊温度控制器设计
2.2 双模糊控制策略
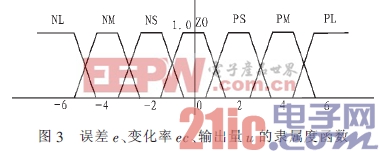
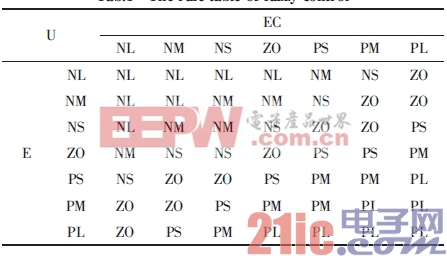
考虑温度控制的特点, 将误差e、变化率ec 及输出量u的论域设为[-6,6],将其量化为13 个等级,并分别为误差e、变化率ec、输出量u 选取7 个语言值,即{NL,NM,NS,ZO,PS,PM,PL}。三者的隶属度函数均采用梯形分布[5],如图3 所示。根据对工业过程控制的经验总结,制定相应的模糊控制规则表如表1 所示。
为提高系统的实时响应速度,事先根据模糊控制规则表及语言变量赋值表, 离线计算出模糊控制总表如表2 所示,该表经严格的实践检验和反复修改后存放在单片机的程序存储器中。然后根据输入量e 及ec 在不同工作状态的实际变化范围及其论域,计算出量化因子Ke1、Kec1和Ke2、Kec2,并确定出比例因子Ku1和Ku2。实际控制时,模糊控制器把系统在不同工作状态下的输入量e 及ec 分别乘以相应的Ke、Kec,并量化到输入量的语言变量论域中,再根据量化的结果与模糊控制总表进行比较,通过查表程序得到所需的输出量U,最后乘以Ku,得到系统在不同工作状态下的实际输出控制量u。
3 控制器软件设计
双模糊温度控制器的软件采用模块化设计思想,主要包括主程序、温度采集程序、键盘/显示控制程序、模糊控制算法程序等。下面主要给出主程序及模糊控制算法程序流程图,分别如图4、图5 所示[6]。
4 结束语
文中提出的以单片机为控制核心的双模糊温度控制器,是以比例因子自整定模糊控制理论为基础,根据系统误差大小利用两个系统因子不同的模糊控制器分别进行温度控制。结构简单、易于实现、适应力强,可较大提高稳态精度,对于温度控制可以达到很好的控制效果,可广泛应用于工业生产中。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码