分布式传感器网络环境的多目标跟踪和特征管理设计
而本地信息被运用来降低由香农信息所得的信任矩阵的不确定性。LxK信任矩阵的香农信息定义如下:
接下来的问题是将该信息关联到信任矩阵。信任矩阵具有如下性质:各列之和等于1;各行之后保持不变;各列之和的和与各列之和的和相等。如果将某列替换为本地信息,将无法保证以上性质。当且仅当本地信息能够降低信任矩阵的不确定性时才能与信任矩阵进行关联。
4.3 信息融合
DMTIM算法通过信息融合来计算本地传感器网络的全局信息,具体包括来自不同传感器的状态估计值和特征信任向量的融合。
特征信息(信任向量)的融合能够被表述为最优化的问题。3个不同的成本函数,香农信息(Shannon information),切尔洛夫信息(Chemo ff information),以及莱布勒距离(Kullbaek-Leibler distances)之和代表了不同的性能指标。本文场景中所有的传感器都参与协同工作,因此我们采用香农信息的方法。
假设本地传感器提供了两个信任向量
。香农信息法用计算两个信任向量的凸函数的方法求得一个融合信任向量:
鉴于每个目标可能具有来自不同传感器的多重轨迹,运用轨迹数据融合方法来对多重的轨迹进行合并。设ωi为来自传感器i的轨迹,NBi为包括i并与i相邻的一系列传感器。设Y’={τk(t):τk∈ωj,1≤t≤T,1≤k≤ω|ωj|,j∈NBi}为所有确定目标的一系列观测结果。通过重叠观测区域,可以由Y’得到一系列合并观测结果Y。于是得到一系列新的轨迹ωinit。然后对一系列合并观测结果运行算法,以得出本地稳定的跟踪轨迹,其初始状态为ωinit。
5 仿真结果
在该节中,提供一个简单的场景来说明DMTIM算法的性能。环境中有两个固定传感器--空中交通管制雷达,在二维空间中对多架飞机进行跟踪。假定每个传感器观测范围的半径为10 km,并且当两传感器距离进入20 km的通信范围,它们之间可以实现相互通信。该场景中包含3架飞机,如图4所示。被标注为A和B的飞机首先被预注册,被标注为的飞机对于特征管理系统是未知的。左侧传感器被传感器1所标注,右侧传感器被传感器2所标注。每个传感器中的多目标跟踪模块对目标的数量进行估算,并且对每个已知目标的轨迹进行估算。在图5中,目标数量改变的事件被垂直的点线所标注。在时刻1,传感器1感知到目标1,并且其信任向量为是目标k能够被传感器i所感知并标定为j的概率;同时传感器2感知到它的目标1,并且其信任向量为。在时刻9,传感器1发现新目标(传感器1的目标2),并赋予新值X。同时,传感器2感知到新目标(传感器2的目标2),该目标的特征值和状态估计信息从传感器1转移过来。以此类推,在时刻30,传感器2的目标2离开了传感器2的观测范围,其信息随机从传感器2删除。
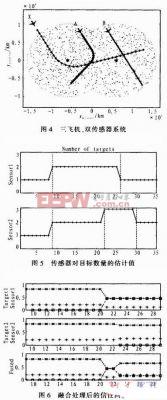
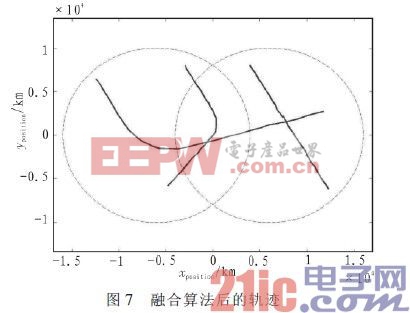
信息融合能够降低目标交叉运动所产生的不确定性。鉴于香农信息效率的优越性,在该试验中我们运用了该方法来实现信息的融合。图6所示为融合的信任向量,图7为实现状态估计融合后各传感器所估算的轨迹。
6 结论
笔者主要对传感器网络下多目标的跟踪和特征管理方法进行了研究。数据关联和多目标跟踪的问题能够由马尔科夫链蒙特卡洛数据关联算法有效地解决,该算法能够对数量未知且数量随时间变化的多目标进行跟踪。文中还讲述了一个可扩展的分布式多目标跟踪和身份管理(DMTIM)算法,该算法能够对多目标进行跟踪,并在分布式传感器网络环境下能够有效地管理目标的特征。DMTIM算法由数据关联,多目标跟踪,特征管理,以及信息融合四部分所组成。DMTIM能够对某目标特征的本地信息进行有效地整合,以降低系统的不确定性,并通过信息融合来保持相邻传感器的本地一致性。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码