分布式传感器网络环境的多目标跟踪和特征管理设计
3 马尔科夫链蒙特卡洛数据融合
本节提出一种解决第二节中多目标跟踪问题的算法,该算法是离散多目标跟踪与识别算法模块的核心。
3.1 马尔科夫链蒙特卡洛模型
马尔科夫链蒙特卡洛模型是已知唯一能在多项式时间复杂问题下实现估值计算的方法,同时,还是一种从位于空间Ω的分布π中提取抽样值的普遍方法,该方法通过状态值ω∈Ω和稳定分布值π(ω)建立的马尔科夫链M来实现其算法。现在来描述该算法。在状态ω∈Ω,假设ω’∈Ω服从分布q(ω,ω’)。而运动的感知服从感知慨率A(ω,ω’),其中:
N→∞。可以注意到公式(4)只需计算出π(ω’)/π(ω)的比值,而无需对π进行标准化。
3.2 马尔科夫链蒙特卡洛数据关联
MCMCDA算法是马尔科夫链蒙特卡洛算法的特殊形式,其状态空间是上文在第2.2节中提到的,并且其平稳分布服从公式(3)。对于MCMCDA的分布有5类动作组成。它们包括:1)发现/消失运动;2)分割/合并运动:3)扩展/减少运动;4)跟踪刷新运动;5)跟踪切换运动。
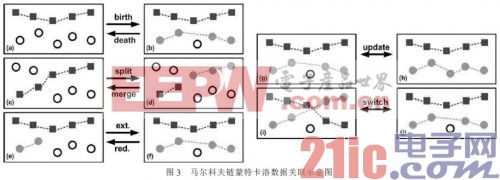
MCMCDA的运动方式如图3中所示,每个运动的详细描述在此省略。MCMCDA的输入是一系列观测值Y,样本观测值的个数nmc,初始状态ωinit,以及有界函数X:Ω→Rm。对于该算法的每一步,ω是马尔科夫链的当前状态。其获取概率A(ω,ω’)如公式(4),输出接近MMSE的估计值EπX,且接近MAP的估计值arg maxP(ω|Y)。
4 分布式多目标跟踪与特征管理算法结构
现在对分布式多目标跟踪与特征管理算法进行详细描述。运用一种信念向量来表示目标的特征。对于多目标的情况下,我们需要运用信念矩阵B(t),其各列由信念向量Bij(t)所组成。因此,向量表示目标j能被t时刻的i所确定的概率。
4.1 多目标跟踪(数据关联)
DMTIM多目标跟踪(数据关联)模块的输出涉及到混合矩阵、状态估计值和本地信息三者的计算。
首先需要求得混合矩阵。假设在观测范围内有K个目标具有K个特征,因此特征管理意味着对多目标的特征进行匹配。对此,运用Identi ty-Mass-Flow的方法。混合矩阵是一个KxK矩阵,其元素Mij(t)表示目标i在t-1时刻变成目标j的概率。而MCMCDA能够在多项式时间下对混合矩阵进行有效地估算。
然后需要对状态估计值进行计算。如上所述,MCMCDA能够对未知数量的多目标进行跟踪,并且能够实现轨迹的发生与终止。在每一个采样时间段,其测量值与前一段的测量值相叠加,从而构造出测量值集合Y。MCMCDA能求出,其值接近多目标跟踪的MAP估计值,以及中所有轨迹的状态估计值。对于每一个轨迹τ∈ω,将它与之前发现的目标轨迹进行比较。如果τ与之前目标轨迹的测量值无任何相同之处,那么我们认定其为新目标。然后,当前传感器τ对于对相邻传感器进行询问,如果相邻传感器对τ已知,那么它的特征将被复制到当前传感器当中。否则,将对τ创建新的特征。最后,当轨迹结束时,对目标特征进行删除。在第4.2节,将对目标数量变化情况下信任矩阵如何实现刷新进行描述。
最后计算表示为信任向量的形式的本地信息。MCMCDA方法能够通过最新的,以及之前的测量值有效地计算出本地信息。当目标和轨迹的数量处于估计值的情况下,本地信息能够被同时计算出来。对于特征值k,定义Njk为时间点个数,第j个最新观测值与之前的观测值合并,观测值在之前的nbi个采样值中由k表征,其中nbi为之前的采样值数量。算法结束时对特征值k计算 ![]() 。然后根据最新的观测值来对向量进行调整,进而通过γk来形成本地信息。
。然后根据最新的观测值来对向量进行调整,进而通过γk来形成本地信息。
4.2 特征管理
特征管理模块包括信任矩阵刷新和本地信息关联,而多目标跟踪(数据关联)的混合矩阵和本地信息被用来刷新信任矩阵。
信任矩阵刷新模块包含存储在KxK信任矩阵B(t)中的特征信息。信任矩阵的刷新如下:
B(t)=B(t-1)M(t) (6)
可以看出,公式(6)使信任矩阵行、列之和保持不变。然而目标数量的变化使该方法不适用于分布式特征管理。数量的变化有两种情形:目标离开和进人观测区域。目标离开,对传感器中混合矩阵的相应列进行删除;目标进入,又有两种情形:1)目标从相邻传感器区域进入,2)目标从未知区域进入。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码