无源自适应控制Buck-Boost变换器研究
2.3 Buck-Boost变换器的无源控制器设计
将Buck-Boost变换器的状态空间方程整理为:
通过间接控制期望值Iref得到d,进而控制系统输出电压,使其输出渐近稳定于期望输出。
3 无源控制仿真研究
Buck-Boost变换器元件参数:L=400μH,C=200 μF,R=50 Ω,E=12 V,开关频率为40 kHz,稳态时d=0.5,期望输出电压为12 V。注入阻尼值R1=0.5,参考电感电流设置为1.618 A。图2为变换器仅使用无源控制时负载电压的输出响应。
由图2a可知,无扰动时上升时间约为5.4 ms,输出电压无超调,调节时间约为7.4 ms,稳态输出电压(12+0.013)V。图2b为系统输入电源在0.06 s时发生33.3%扰动变化后(电压由12 V变化到8 V)负载电压输出响应,系统稳态输出只有(8.28±0.008)V,不能满足稳态要求。
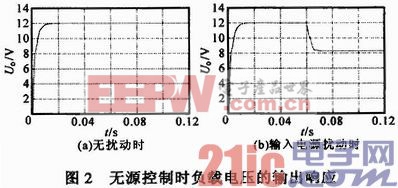
仿真结果表明:在无扰动时,无源控制使得变换器的输出电压快速恢复到稳定状态,适当选取注入的阻尼值可减小输出电压振荡,缩短系统调节时间。但当输入电源宽范围扰动时,无源控制不能使输出电压恢复到期望值。
4 无源自适应控制器的设计
4.1 模型参考自遗应控制结构的建立
鉴于单纯使用无源控制器无法解决宽范围电源输入扰动的问题,此处提出无源自适应控制策,结构框图如图3所示,其基本思想是:将Buck-Boost变换器期望输出的恒值电压X2ref作为参考模型,无源控制器和Buck-Boost变换器共同作为可调模型(虚线框所示),自适应律作为自适应机构,建立模型参考自适应控制结构。
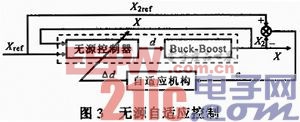
参考模型和可调模型被Xref所激励,X2ref和X2分别为参考模型和可调模型的状态。X2ref规定了Buck-Boost变换器期望输出的电压,这里选用X2ref保证了参考模型的准确性;而X2是实际测量到的Buck-Boost变换器输出电压。X2ref与X2比较后得到e,将e输入自适应机构,由自适应机构来修改可调模型的参数,即变换器开关占空比d,使得X2能快速稳定地逼近X2ref。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码