双SRM无位置控制系统在采煤机中的应用
3 双SRM无传感器控制系统设计
双SRM控制系统分为主、从两个系统。每个系统拥有独立的驱动电路、功率变换器、电压电流采样电路、保护电路等。主、从机均采用磁链-电流模型获取转子位置角度,其中主机为转速电流双闭环结构,控制器实时对电压、电流进行采样,将主机运行电流作为从机给定输入,形成电流闭环。图3示出双SRM无传感器控制框图。
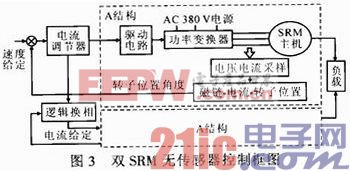
采煤机工作时因两台SRM是刚性连接,故转速n相同,为了确保电机的输出功率相同,仅需控制电机输出相同转矩。SRM的绕组电流平均值近似与电机输出转矩成线性关系,因此调节两台SRM绕组电流平衡就能使输出功率平衡。控制系统中从机给定输入是主机运行电流,因此,存在负载转矩差异的情况下,两台SRM仍能保持相同转矩输出,实现功率平衡。
4 实验验证
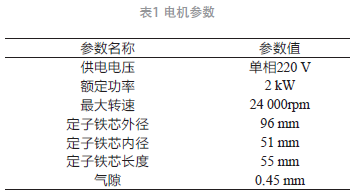
以TMS320F2812型DSP为核心控制器,在某型电牵引采煤机上对两台SRM样机进行实验。样机参数为:三相12/8结构,额定功率18.5 kW,额定电压514 V,额定转速1 500 r·min-1。主、从功率变换器均采用三相不对称半桥式结构,有源前端采用两电平可控整流结构,输入电压为三相交流380 V,直流母线电压给定为650 V。图4a为电机稳态运行时转子估计位置和实际位置比较波形。图4b为稳态运行时主、从机的定子相电流波形。
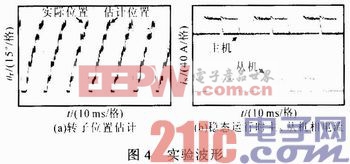
可见,通过磁链-电流法计算出的估计位置与实际位置的误差很小,能够满足系统运行需求。在双SRM的控制策略下,主、从机相电流基本相等,换相平稳,转矩脉动小,恒转矩特性较好。
5 结论
建立了电机磁链特性曲线,通过磁链、相电流对转子位置进行了估算。提出了双SRM无位置传感器控制策略。以TMS320F2812型DSP为核心控制器,搭建了两台SRM控制样机,并进行了实验。实验结果表明,两台电机输出转矩平稳,转子位置估计精确,输出功率基本平衡。在相同的负载情况下,双SRM的总转动惯量比单机系统小,运行时消耗的电能也少。当双SRM中只有一台损坏时,另一台还能正常工作,采煤机的运行可靠性更高。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码