双SRM无位置控制系统在采煤机中的应用
式中:T为离散积分磁链的计算周期;u(k),i(k),r(k)均为第k个离散周期内绕组的电压、电流和电阻值。
2.2.2 磁链-电流法
电机运行中无需每一时刻的转子位置,仅需转子的精确换相位置。简化磁链-电流法通过采样的相电压和相电流由式(3)估算出ψ,再与当前相电流对应的换相位置磁链比较,若前者大于后者就认为换相位置己到,开始换相;否则继续导通。图2为简化磁链-电流法的原理框图。

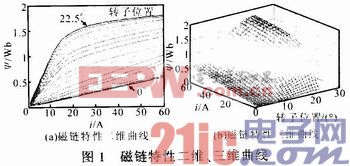
换相位置磁链一般通过最大电感处磁链ψm乘以系数K(0K1)得到,因此只需测出ψm关于电流的曲线,然后以二维表的形式存储,无需其他位置的磁链曲线。电机的转速为:
n=kconc△θ/△t (4)
式中:△θ为相邻两相的角度差;△t为两相邻换相时间间隔;kconc为角速度转换速度的系数。
转子的位置可由速度估算得出。此方法所需内存小,算法简单,结果较准确。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码