基于CAN总线的分布式电动型AMT系统
针对我国公交车辆的特点, 分布式全电动型AMT 系统较电2液控制型和集中控制式全电动型更加合理有效。公交车辆作为市场运营车辆,降低制造成本与运营成本需要作为新技术推广的首要问题来考虑。同时公交车辆的动力总成功率容量较大,所需驱动换档机构和离合器操纵机构的电机功率较大,线路传递的电流也较大,同时蓄电池、ECU 和各执行电机的相对安装距离较远,需要特别注意线路的铜损问题。从实车试验的结果可以看出采用分布式结构设计能有效地降低AMT 系统的线损,提高驱动电机两端的端电压。以AMT 系统中驱动功率需求最大的是离合器控制电机为例,当电池端电压为24 V ,驱动电流为25 A 时,采用集中控制的电机端电压为18 V ,而采用分布式控制的电机端电压可提高为21 V 。
分布式全电动型AMT 系统的工作原理:
a. 核心部分。ECU 根据驾驶员操纵加速踏板、制动踏板和换档杆等的意图,如起步、停车、倒车和强制档等以及车辆的工作状态(发动机转速、车速、档位和离合器行程等) ,依据适当的控制规律作出判断,将结果通过CAN 总线传递到各个控制电路,并协调各控制电路工作。
b. 节点部分。接收到由核心部分传来的工作指令后,控制电路对相应的执行电机(油门操纵电机、离合器操纵电机、选换档操纵电机) 进行操作,并通过相应位置传感器构成反馈控制,来实现车辆动力传动系统(发动机、离合器和变速器) 的准确的自动操纵。
驾驶员在驾驶车辆过程中,不断感知车辆行驶的外界环境(如上坡、下坡、粗糙路面、湿滑路面、弯道和红灯等) 和车辆本身的工作状态,通过操纵加速踏板、制动踏板和选档手柄等,将起步、停车、倒车和强制档等意图以电信号的方式传递给电子控制单元ECU ,ECU 采集输入信号后,经过运算、判断和决策等信息加工处理,发出工作命令给控制电路,再由控制电路控制执行电机完成相应的操纵动作。汽车在行驶过程中,驾驶员对加速踏板的控制通过加速踏板位移传感器传递给ECU , ECU 通过所测加速踏板位移值以及当前车辆行驶的速度等车辆参数,再根据自动换档规律判断车辆应处的最佳档位,决定升档、降档或保持原档位不变,从而达到加速或减速的目的。在车辆运行时,如果驾驶员想降速或者停车,则可通过踩制动踏板将意图传给ECU , ECU 再进行相应的处理[ 1 ] 。
2 控制节点设计
AMT 离合器控制机构、发动机节气门(油门)控制机构、选档和换档控制机构采用自带位置传感器与车辆低压电器相同电压等级的直流电机(文中采用24 V 直流永磁有刷电机) 驱动,控制方式是目前已非常成熟的PWM 斩波控制。功率MOSFET组成H 桥驱动方式,按照AMT 的控制规律实现对电机速度和位置的准确控制。
控制节点采用M68HC908GZ16 微控制器作为控制芯片。其微控制器采用了MC68HC908 增强型中央处理器CPU08 ,是一种高性能的8 位单片机系列, 具有速度快、功能强、价格低等特点。M68HC908GZ16 微控制器片内集成了CAN 总线2. 0 控制模块。片内有16 kB Flash ,1 kB RAM 和8 路10 位A/ D ,SPI ,SCI ,4 路16 位定时器等,适合在基于CAN 总线的控制系统应用。
利用M68HC908GZ16 具有的丰富接口资源,执行电机转子转角模拟输入信号由滤波电路处理后,再用MCU 的A/ D 转换模块进行采集,再通过CAN 总线反馈到主控模块中,对系统动作进行监控。其PTE , T2CH 引脚实现对驱动电路的控制。其硬件原理如图3 所示。
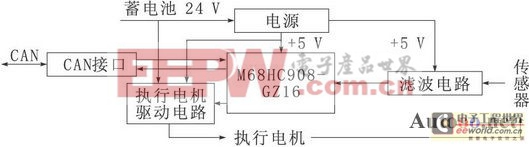
图3 AMT 控制节点结构原理
对电机的驱动采用场效应功率MOS 管,通过PWM 波对MOSFET 的开关控制,达到控制电动机电枢电压,实现调速目的。选用Infineon 公司生产的一款用于驱动大功率直流电机的智能型H 桥驱动芯片B TS7810 K,简化了设计过程,同时提高了可靠性。该芯片集成了4 个D2MOS 开关管,即可以组成为桥式电路也可以当作4 个独立的开关管使用;具有低的导通电阻RDS(ON) ,在25 ℃的结温度下,高侧2 个开关低至26 mΩ ,低侧2 个开关低至14 mΩ;每个开关管可以承受高达42 A 的峰值电流(在25 ℃的结温度下) ,并且具有非常低的静态漏电流(4μA) ;具有动力电源正负极短路保护功能;能够承受40 V 的直流电压;提供过热状态输出信号和过热保护功能;提供欠压检测功能;具有钳位二极管保护功能;高侧开关负载开路检测功能等。而且该芯片的工作温度范围为- 40~150 ℃,适合汽车运用环境。
由于采用了分布式控制系统,AMT 控制节点对电机速度和转角位置的控制精度直接影响到了AMT 的性能。为了对电机进行精确的控制,必须采用负反馈闭环控制系统。整个闭环控制系统是由被控对象(这里是直流电机驱动的机构负载) 和控制器2 部分组成的。控制器以误差/ 偏差作为控制器输入信号,按照某种控制规律对该信号作出运算,然后向被控对象发出控制信号,使得误差/ 偏差得到消除或者是减小,从而达到预期的控制目的。目前,在广泛使用的控制器中,常常采用比例、微分和积分等基本控制规律,或用这些基本控制规律的适当组合,比如PID 控制器,对被控对象进行有效控制。很多智能控制系统也往往是在这些控制规律的基础上发展起来的。
通过建立一个以PID 控制规律对直流减速电机进行转角位置控制的系统,建立其数学传递函数,进行仿真分析。然后运用单片机搭建数字控制系统,编写数字PID 控制程序,经过调试,整定PID 参数,以获得较好的输出动态性能和稳态精度。
采用M68HC908GZ16 芯片作为数字控制器,利用其内部的10 位A/ D 转换器,编写了直流减速电机的数字PID 控制程序。该数字PID 控制器的控制输出量为电机的电枢电压,反馈信号是蜗轮蜗杆直流减速电机输出轴的角位移的A/ D 采样值。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码





