基于CAN总线的分布式电动型AMT系统
引言
电控机械式自动变速器(AMT) ,是运用微电子技术改造传统手动变速器的典型机电一体化产品。AMT 是在干式摩擦离合器和固定轴式齿轮变速器的基础上改造的。它结构简单,保留了干式离合器与手动变速器的绝大部分总成部件,改变了其中手动操纵系统的换档部分,去掉离合器踏板,去掉加速踏板和油门之间的拉索,改为电子控制装置自动操纵[1 ] 。通过电子控制单元( ECU) 控制液压、气动或电动执行机构,完成汽车起步、换档的自动操纵。
特别是对于公交车辆,大功率容量的自动变速器主要依靠进口,而且在实际运营中出现了采用自动变速器后整车油耗上升1/ 3 至1/ 2 的现象,以至于有些运营单位买得起也养不起[2 ] 。与传统自动变速器相比,AMT 方案可以在原有的机械变速器上进行改造,生产继承性好、结构简单、制造容易、维护维修成本低适合中国国情。同时AMT 不经过液力耦合器,减少了能耗,对整车节能有重大意义。
1 分布式全电动型AMT 工作原理
按照不同的控制机构来区分,AMT 系统存在电2液的、电2气的和全电动的等3 种控制方式[3 ] 。
电2液控制方式:由电控单元发出指令控制电磁阀,通过液压系统驱动来自动地完成离合器的结合、分离和变速器的选档、换档等动作。
电2气控制方式:与电2液控制方式原理基本相同,也是电控单元发出指令控制电磁阀,不同的是控制机构变为气动系统。
电动控制方式:用电机作为执行电控单元指令的机构,来实现档位和离合器的操纵。
由于启动电磁阀和气动作用缸构成的气动执行器体积大、笨重、反应慢,在AMT 系统的应用中,已不再考虑这种方案。然而,使用电动执行器或是液压执行器的问题一直存在着争论。在实际应用中,取舍的焦点是成本、体积、重量和平均功率消耗等。
液压系统不仅需要执行器件,而且需要液压泵系统和蓄能器硬件。通常,液压控制系统比电动控制系统具有更高的价格和维修保养成本。电2液型AMT 以电子控制单元ECU 为核心,通过液压系统控制来取代原来由人工操作完成的离合器的分离与
结合、变速器的选、换档动作和发动机油门的调节,以实现车辆起步、换档的自动操纵[4 - 5 ] 。ECU 根据驾驶员的意图(加速踏板、选档手柄等) ,按照设定的控制规律(换档规律、离合器接合规律等) ,输出换档电信号,控制电磁阀的通断,借助于液压系统对车辆的动力传动系统(发动机、离合器和变速器) 进行协调操纵,完成车辆的平稳起步和自动换档。
而对于电动系统,它的驱动媒介为电线,因此所需要考虑的布置空间仅为安装电机及其传动器件的空间。而且它节约能量,在不需要换挡时系统给电机断电,只有当需要选换挡时才给电机供电,另外它结构比较简单,并随着新技术的发展成本逐渐下降,所以在汽车工业中,已经存在逐渐增多使用电动系统的趋势[6 ] 。但电动系统仍有一些需要改进的问题,如执行动作没有液压系统精确,特别是因电线布置过长而导致线损增加及传感器信号容易失真等。
按照如图1 所示这种集中控制的结构来设计全电动型AMT 系统实际上是可行的,只要把执行机构与传动机构更换就可以了。但考虑到驱动电机需要较强的电流,存在增加线损和产生电磁干扰等问题,所以控制系统采用分布式的拓扑结构将更加有利。将执行机构的控制电路从ECU 中分离出来,安装在执行机构附近,与ECU 主部分以CAN 总线相连接,如图2 所示。这样将大大缩短了强电流的运行路线和从执行机构到控制系统反馈线长,有利于减少线损、降低成本和防止反馈信息受干扰。
电控机械式自动变速器(AMT) ,是运用微电子技术改造传统手动变速器的典型机电一体化产品。AMT 是在干式摩擦离合器和固定轴式齿轮变速器的基础上改造的。它结构简单,保留了干式离合器与手动变速器的绝大部分总成部件,改变了其中手动操纵系统的换档部分,去掉离合器踏板,去掉加速踏板和油门之间的拉索,改为电子控制装置自动操纵[1 ] 。通过电子控制单元( ECU) 控制液压、气动或电动执行机构,完成汽车起步、换档的自动操纵。
特别是对于公交车辆,大功率容量的自动变速器主要依靠进口,而且在实际运营中出现了采用自动变速器后整车油耗上升1/ 3 至1/ 2 的现象,以至于有些运营单位买得起也养不起[2 ] 。与传统自动变速器相比,AMT 方案可以在原有的机械变速器上进行改造,生产继承性好、结构简单、制造容易、维护维修成本低适合中国国情。同时AMT 不经过液力耦合器,减少了能耗,对整车节能有重大意义。
1 分布式全电动型AMT 工作原理
按照不同的控制机构来区分,AMT 系统存在电2液的、电2气的和全电动的等3 种控制方式[3 ] 。
电2液控制方式:由电控单元发出指令控制电磁阀,通过液压系统驱动来自动地完成离合器的结合、分离和变速器的选档、换档等动作。
电2气控制方式:与电2液控制方式原理基本相同,也是电控单元发出指令控制电磁阀,不同的是控制机构变为气动系统。
电动控制方式:用电机作为执行电控单元指令的机构,来实现档位和离合器的操纵。
由于启动电磁阀和气动作用缸构成的气动执行器体积大、笨重、反应慢,在AMT 系统的应用中,已不再考虑这种方案。然而,使用电动执行器或是液压执行器的问题一直存在着争论。在实际应用中,取舍的焦点是成本、体积、重量和平均功率消耗等。
液压系统不仅需要执行器件,而且需要液压泵系统和蓄能器硬件。通常,液压控制系统比电动控制系统具有更高的价格和维修保养成本。电2液型AMT 以电子控制单元ECU 为核心,通过液压系统控制来取代原来由人工操作完成的离合器的分离与
结合、变速器的选、换档动作和发动机油门的调节,以实现车辆起步、换档的自动操纵[4 - 5 ] 。ECU 根据驾驶员的意图(加速踏板、选档手柄等) ,按照设定的控制规律(换档规律、离合器接合规律等) ,输出换档电信号,控制电磁阀的通断,借助于液压系统对车辆的动力传动系统(发动机、离合器和变速器) 进行协调操纵,完成车辆的平稳起步和自动换档。
而对于电动系统,它的驱动媒介为电线,因此所需要考虑的布置空间仅为安装电机及其传动器件的空间。而且它节约能量,在不需要换挡时系统给电机断电,只有当需要选换挡时才给电机供电,另外它结构比较简单,并随着新技术的发展成本逐渐下降,所以在汽车工业中,已经存在逐渐增多使用电动系统的趋势[6 ] 。但电动系统仍有一些需要改进的问题,如执行动作没有液压系统精确,特别是因电线布置过长而导致线损增加及传感器信号容易失真等。
按照如图1 所示这种集中控制的结构来设计全电动型AMT 系统实际上是可行的,只要把执行机构与传动机构更换就可以了。但考虑到驱动电机需要较强的电流,存在增加线损和产生电磁干扰等问题,所以控制系统采用分布式的拓扑结构将更加有利。将执行机构的控制电路从ECU 中分离出来,安装在执行机构附近,与ECU 主部分以CAN 总线相连接,如图2 所示。这样将大大缩短了强电流的运行路线和从执行机构到控制系统反馈线长,有利于减少线损、降低成本和防止反馈信息受干扰。
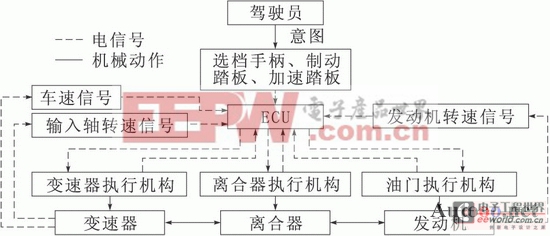
图1 集中控制AMT 系统的结构

图2 分布式全电动型AMT 系统的结构

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码





