基于BP神经网络的数字式涡流传感器特性曲线拟合的实现
1.2 测量原理
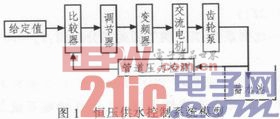
数字式涡流传感器的测量原理方框图如图2所示。

为了尽可能使数字式涡流传感器输出频率达到稳定,实验过程中选用性能稳定的集成LC振荡器MC1648。在探头接近破测试件时,因为探头线圈L和谐振电容器C构成谐振回路,谐振频率表达式如(5)式所示:
![]()
上式中L为探头线圈自感值,C为谐振电容器电容值。因为电感L是位移d的单值函数,所以传感器输出信号的频率f与被测试件的位移量d之间成正比。传感器输出信号经电压比较器和整形电路输出为符合TTL电平规范的脉冲数字信号,最后由计算机显示输出。
2 BP神经网络原理
2.1 人工神经元结构
人工神经元是人工神经网络中最基本组成单位。常用的人工神经元模型可用图3模拟。
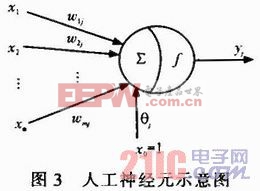
当神经元j有多个输入xi(i=1,2,…,m)和单个输出yj时,输入和输出的关系如(6)式所示:
![]()
式中θj为阈值,wij为从神经元i到神经元j的连接权重因子,f(·)为传递函数或称为激励函数。
2.2 BP网络学习过程
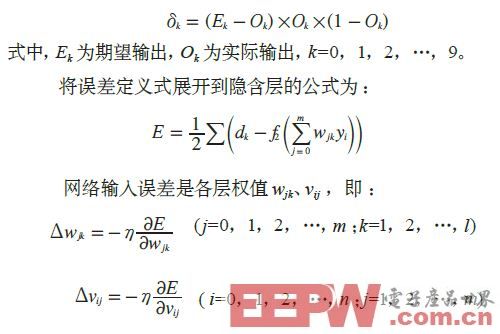
BP算法是一种监督式的学习算法。BP神经网络算法的主要思想是:假设输入样本为P1,P2,…,Pn,目标样本为T1,T2,…,Tn,网络的输出为A1,A2,…,An。当输出与目标样本产生误差之后,利用误差反向传播回去进行调整权值,尽可能使输出A1,A2,…,An与目标样本T1,T2,…,Tn相近,使误差达到最小值,权值调整结束。BP算法是由两部分组成:信息的正向传递与误差的反向传播。在正向传播过程中,输入信息从输入经隐含层逐层计算传向输出层,每一层神经元的状态只影响下一层神经元的状态。如果在输出层没有得到期望输出,则计算输出层的误差变化值,然后转向反向传播,通过网络将误差信号沿原来的连接通路反传回来修改各神经元的权值直至达到期望目标。
3 BP神经网络的MATLAB设计
设计一个BP网络需要确定神经元的特性和网络的输入层、隐层、输出层以及各层之间的传输函数。
3.1 网络层数
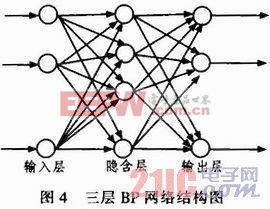
反向传播网络是基于BP误差传播算法的多层前馈网络。多层BP网络不仅有输入节点、输出节点,而且还有一层或多层隐含节点。一个三层的BP网络理论上可逼近任意的非线性映射,为避免网络规模过大,隐含层层数不宜多,因此文中在实现对于数字式涡流传感器实验数据曲线拟合时,采用三层的BP网络就可以满足需要。三层BP网络的拓扑结构如图4所示,包括输入层、隐含层和输出层,层与层之问采用全连接方式。各神经元与下一层所有的神经元联结,同一层单元之间不存在相互连接,用箭头表示信息的流动。
3.2 输入层、输出层的节点数
BP网络的输入层的神经元数由输入数据变量个数确定。
本文以数字式涡流传感器的输入(被测位移量)作为输入节点,输入层的节点数为1;以数字式涡流传感器的输出(输出频率f)作为输出节点,输出层的节点数为1。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码