四旋翼无人机建模及其PID控制律设计
3 实验结果与分析
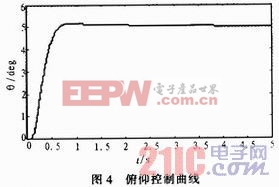
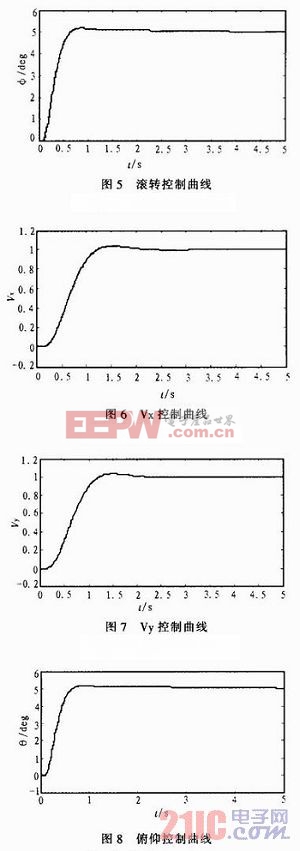
3.1 在没有重心偏移情况下的控制结果
在没有重心偏移情况下俯仰角和滚转一起控制5度的结果表明pid能有效的控制控制量在很快的时间内达到预期的效果。
在姿态角控制基础上近一步加入速度控制,而且速度控制只是简单的比例控制,实验结果很好。
3.2 重心偏移条件下的控制结果
为了检验PID控制效果,文中对四旋翼的重心进行了偏移,控制结果表明控制量的快速性变差,但是控制依然平滑有效。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码




