最基础电学电路:仿生避障机器人制作
1.3电路原理
本项目的电路非常简单,由一个最基本的电学电路组成。
1、机器人的动力是由两个直流电机提供的,众所周知,直流电机的两个电极连接直流电源,通过改变两个电极所连接电源的正负极,可以改变电机的旋转方向(顺时针或逆时针)。
2、电源为两节7号电池,每节电池作为一个独立的供电单元,每个电机某一时刻只有一节电池为其供电。如果前进时是一节电池供电,后退时则是另外一节电池以相反电流的方式供电。
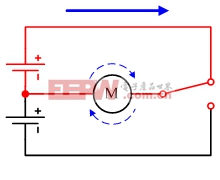
3、通过三引脚的碰撞开关,可以控制电机采用哪一单元的电池进行供电,而碰撞开关则连接触须,触须被挤压则碰撞开关被触发。 下图为其中一个电机的控制原理。
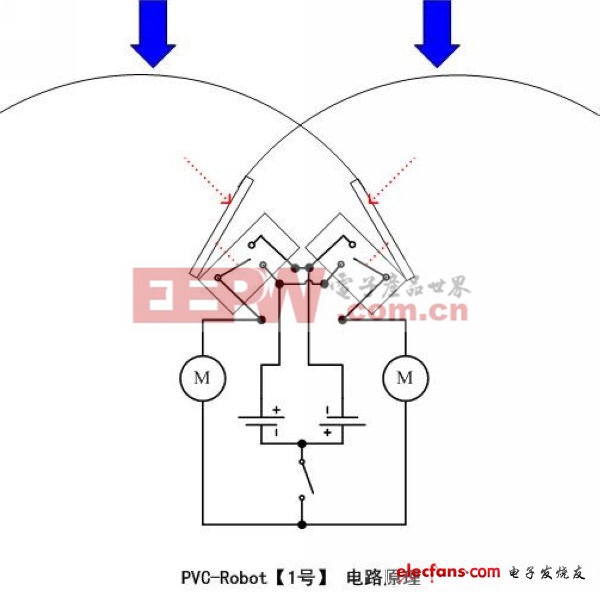
4、机器人头部有两根钢丝作的触须,触须分别连接在两个碰撞开关上(注意两根钢丝对应的碰撞开关是交叉的,即:“左—右”钢丝,对应“右—左”碰撞开关)。
(1)没有障碍物时,触须没有被挤压,不触发碰撞开关,碰撞开关默认的通路,给电机供给一个“正方向”的电流,电机于是“顺时针方向”旋转。
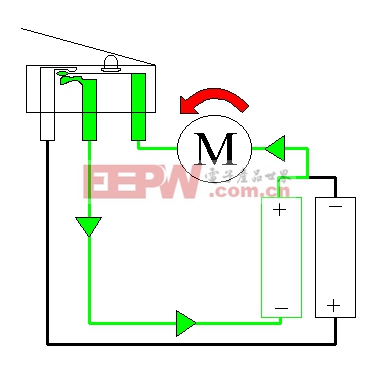
(2)有障碍物时,触须被挤压,触发碰撞开关,碰撞开关断开默认通路,连接另外的一组通路,给电机供一个“反方向”的电流,电机于是“逆时针方向”旋转。
这里给出完整的电路原理图:
为了方便大家,这里再给出实物电路接线图供参考。
2准备工作
本项目需要的器材比较简单,主要包括:PVC线槽、小电机、电池/电池盒、碰撞开关、拨动开关、曲别针、螺丝、小齿轮/滑轮等。

以下列出本项目主要器材,其中的采购预算,由于有些器材采购时一般是批量的,而本项目中实际使用用不了那么多(剩下的可以留在以后的其他项目上),所以另外加了一项成本折算。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码