基于航迹推算的移动式机器人定位系统设计
2.4 中央处理单元
系统使用MEGA128单片机作为主控芯片,该单片机具有2个8位定时器和2个16位定时器以及10路可编程PWM,拥有8个10位ADC通道,因此能够实现对多传感器的信号采集处理。
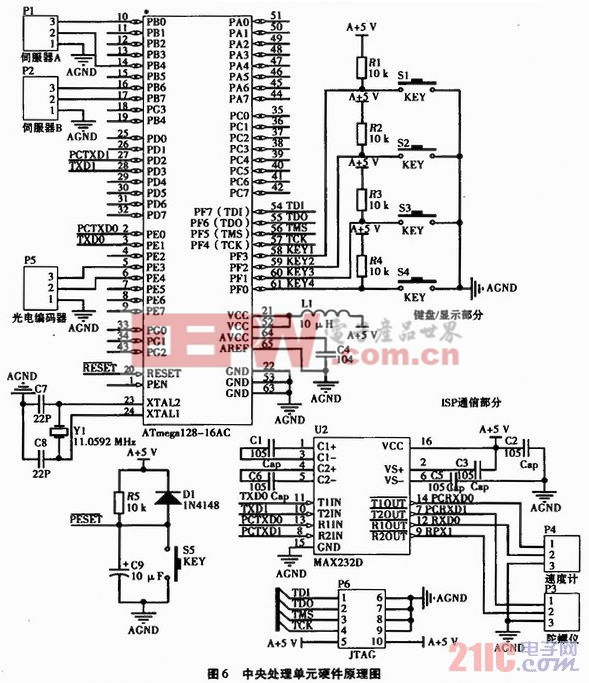
如图6所示为中央处理单元硬件电路原理图,包括了24 V转5 V的直流稳压电源、晶振电路以及外围拓展口电路。在电源部分使用LM117稳压管,能够很好地控制电源纹波,使单片机稳定工作。在外围拓展口部分使用并行总线结构,能够很方便进行使用和开发。

如表1所示为中央处理单元中单片机使用的主要端口功能,包括通信与控制信号的发出以及对编码盘的计数。
3 结果与分析
为验证系统的可行性与稳定性,使用了一个四轮全向轮结构小车进行测试,测试方案如下:在2 m×2 m的平面场地中设定A、B两点,小车在两点间分别多次作直线运动与弧线运动,每次均将实际运行轨迹与理论轨迹进行比较,并分析定位误差。
(1)直线运行小车直线运行10次,每次运行出发地点A均相同,检测实际运行轨迹与理论轨迹误差在5 mm以内,且小车可以快速定位到C点,而C点在B点误差圆内。
(2)弧线运行小车弧线运行10次,每次运行出发地点A均相同,检测实际运行轨迹与理论轨迹最大误差为1 cm,且小车可以快速定位到C点,而C点在B点误差圆内。
试验证明,系统可以完成对任意预设路径的快速定位,基本保证到达目的地,其误差在允许范围之内,且系统充分对CPU资源进行了合理运用,在外围硬件电路设计时考虑了最大程度减小外界对系统的干扰,稳定性较强,达到了预期设计目标。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码