基于航迹推算的移动式机器人定位系统设计
2.2 光电编码器电路
光电编码器是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器,由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分的开通若干个长方形孔,开孔的数量决定了控制的精度。机器人运动时,光栅盘随电机旋转,经发光二极管等电子元件组成的检测装置检测并输出若干脉冲信号,通过采集脉冲个数后运算即可得出机器人运动路径长度。
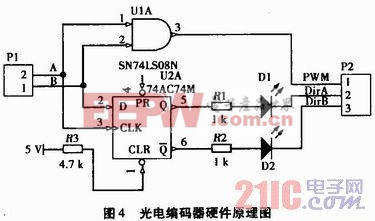
如图4所示为光电编码器的外围采样电路,主要是通过一个与门和一个D触发器来实现对脉冲信号的采集。一般的光电编码器是由A、B、Z三路信号组成,A和B是两个前后相位差为90°的脉冲信号,根据光栅盘的旋转方向,相位差的超前与滞后各不同,因此利用与门将A、B信号整合成一个脉冲信号再利用D触发器判断A、B两者相位差关系。当光栅盘正转时,A超前B 90°,D2发光,同时在DirB处检测到高电平。当光栅盘反转时,A滞后B90°,D1发光,且在DirA处检测到低电平,再通过单片机的处理就能准确判断光栅盘所转过的栅格数,从而计算出机器人运动路径的长度。
![]()
式中,P1表示正转PWM脉冲个数,P2表示反转PWM脉冲个数,n表示编码盘栅格数,r表示机器人动力轮半径。
2.3 陀螺仪硬件电路
设计中采用三轴陀螺仪对加速度进行测量,积分后即可得到所需的角度偏移量,如图5所示为陀螺仪硬件原理图。其工作原理为中央处理单元发送通信数据给陀螺仪使之工作,陀螺仪在机器人发生角度偏移时测量实际偏移量和理论偏移量的差值,将该值传送给中央处理单元,由中央处理单元计算出补偿值后发指令给伺服器,使电机进行误差补偿。
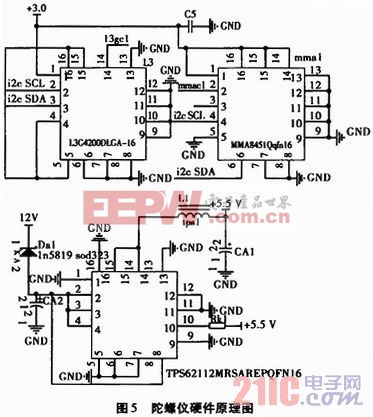
图5中L3G4200D是一个三轴陀螺仪,可以对x、y、z三个方向的角度进行检测,检测后的数据通过ISP通信传送将端口SCL、SDA角度信号传输给中央处理单元。MMA8451Q是一个速度计,可以实时检测机器人的运行速度,并用相同方式将运行速度信号传输给中央处理单元。之所以在此安装速度计,是为了降低中央处理单元中CPU的计算量,让CPU有更多的空间去处理速度与路径的关系。TPS62112是低噪音的同步降压DC—DC转换器,其内部集成了N型和P型MOSFET,可进行同步整流,为陀螺仪芯片提供良好的电源环境。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码