个人卫生护理机器人控制部分的设计与实现
2.8 网络模块
个人卫生护理机器人在工作时可以通过以太网向上位机传送数据,这些数据主要是护理机的工作状态和洗澡者的生命体征数据及报警信号。此模块采用了一款独立的UART,TCP/IP协议模块来完成数据的转换和双向传输。通过对生命体征监测部分的数据交流以得到使用者的心率、血氧饱和度和脉搏信息。经过处理,将这些信息和其他的机器状态报警信号上传至上位机。该模块与主控芯片以串口的方式通信,节约了I/O口。
3 系统软件设计
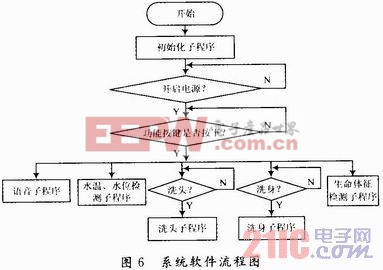
系统软件采用模块化设计,由主程序、初始化子程序、温度检测程序、中断子程序、延时子程序等组成,通过主程序分别调用各子模块完成相应的功能。其软件系统总体框图如图6所示。
4 结语
本文介绍了基于STC89C52的个人卫生护理机器人的设计与实现方法,该系统能够完成自动洗浴的功能,为行动不便的人提供了洗头、洗澡、干身、按摩等服务,较大幅度地减少了为这些人服务的劳动强度。该系统可广泛应用于医院、养老院和需要该类服务的家庭。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码