基于OPenWrt的移动机器人系统设计
系统软件结构如图4所示。
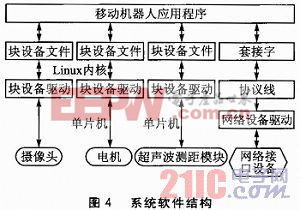
系统驱动程序利用MINI2440开发板提供的例程进行改写,并编译进内核。
摄像头控制软件mjpg-strearner由OpenWrt以软件包形式提供,通过端口8080输出为MJPEG格式的图像。无线通信部分内容为Linux下socket编程,为客户端提供远程控制支持。无线通信的部分代码如下: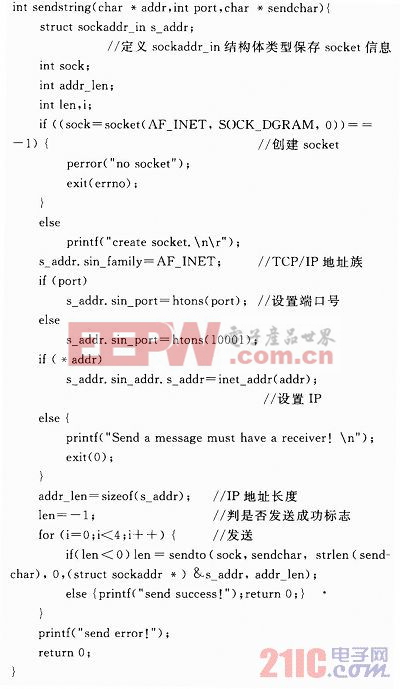

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
系统驱动程序利用MINI2440开发板提供的例程进行改写,并编译进内核。
摄像头控制软件mjpg-strearner由OpenWrt以软件包形式提供,通过端口8080输出为MJPEG格式的图像。无线通信部分内容为Linux下socket编程,为客户端提供远程控制支持。无线通信的部分代码如下:
加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码