基于滑模控制的PWM整流器的研制
摘要:在建立三相PWM整流器的非线性数学模型的基础上,针对传统PI控制难以达到良好的控制效果的问题,采用电压外环为滑模变结构控制,电流内环为前馈解耦控制的方法,并且以DSP为主控芯片搭建实验样机,为降低开关损耗,采取五段式空间矢量调制,实验结果验证了控制策略的可行性和优越性。
关键词:整流器;滑模控制;前馈解耦;空间矢量调制
1 引言
三相PWM整流器具有四象限运行,功率因数高,输入电流谐波含量小等优点,符合“绿色能源”的发展方向,具有广阔的应用前景。目前多采用双环PI控制策略,但由于系统的非线性和强耦合性,很难达到良好的控制效果。滑模变结构控制具有自适应性,动态响应快,快稳定范围等优点,特别适合电力电子系统的开关控制。针对此,这里采用电压外环滑模控制策略,电流内环采用传统的前馈解耦策略,实验结果证明这种混合控制具有较好的动态和稳态性能,应用前景良好。
2 PWM整流器的数学模型
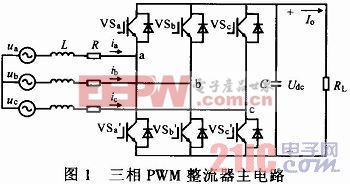
三相电压型PWM整流器的主拓扑如图1所示。ua,ub,uc为三相输入交流电,L,R为输入电感和电路等效内阻,C为输出侧直流电容,RL为负载,定义开关函数:
![]()
可得到其状态方程为:
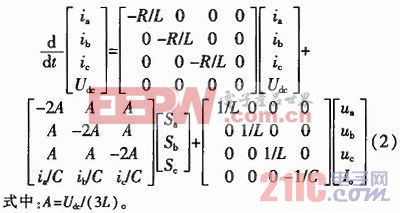
通过坐标变换则可以得其d,q旋转坐标系数学模型为:


加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码