相位差模糊控制在线控制算法中的应用设计
Synchro软件建立的整体分析模型如图9所示。
为了验证本文设计的模糊线控制方法的控制效果,在相同的交通条件下分别对本文的模糊线控制和传统的定时线控制方法(所研究路段正在使用的线控制配时方法)在龙口西路和龙口东路两个路口组成的干线上进行了仿真比较。选龙口西路为相位差基准路口。停车线前车辆的到达服从泊松分布,干线上的关键车流为由西向东的单向交通流,考虑该方向的协调控制,即相位差是该方向上的。设控制方案中最短绿灯时间为20 s,最长绿灯时间为80 s,每隔6个周期对运行方案进行调整,评价指标是平均车辆延误。设次干道的车流量均为600 PCU/h,分别对主干道交通流量为1 000 PCU/h,1100 PCU/h,1 200 PCU/h,1 300 PCU/h,1 400 PCU/h以及1 600 PCU/h时的不同情况下进行了6次仿真对比,每次仿真周期为100个信号周期。
模糊线控制主程序的流程图如图10所示。传统定时线控制使用交通信号控制配时软件Synchro来进行仿真。仿真结果如表3所示。
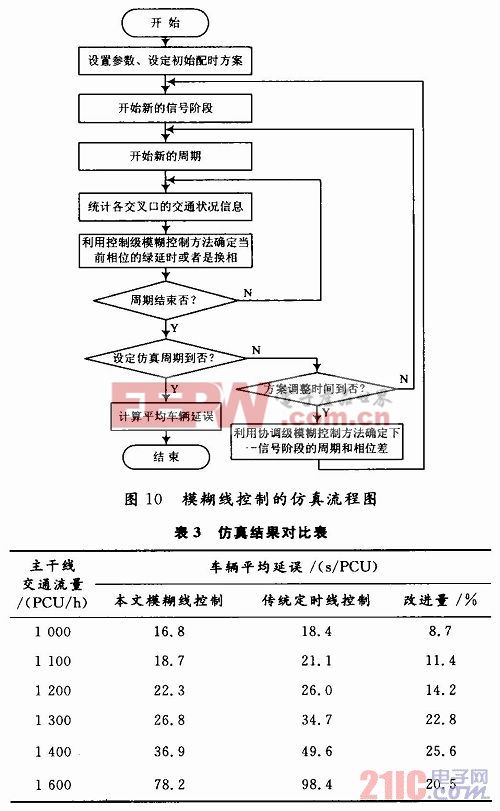
从表3可以看出,本文设计的模糊线控制方法可以有效减少干线上交叉口的车辆平均延误,并且随着主干线交通流量的增加,比传统定时线控制改善的幅度越大,体现了本文设计的模糊线控制算法的优越性,提高了干线的通行效率。
5 结语
城市干线交通信号协调控制,既是交通领域研究的一个热点,又是该领域研究中的一个难点。本文在设计协调级模糊控制器时,提出在模糊控制器的设计输入中加入交通特征参数的变化值,这样可以把交通特征的变化趋势加进来。仿真实例证明了本文设计的模糊线控制算法能有效减少干线上交叉口的平均延误,可以在一定程度上解决城市交通拥堵问题,提高交通效率。
城市交通系统是一个综合性的大系统,要提高交通网的运行效率,单单依靠交通信号控制是远远不行的,应该将交通规划、交通管制、交通诱导等技术与交通信号控制技术相结合对交通进行综合的研究与治理,才能取得较好的效果。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码