轮式自动机器人控制系统
人机交互模块
人机交互模块用来提供人机界面,并且方便程序的调试。人机交互模块主要使用了LCD、E2PROM和SD卡三种方式。采用TFT LCD来显示机器人的运行状态,采用LPC2478内部集成LCD控制器,可以设计出丰富的显示效果和良好的人机界面。机器人一些固定参数存储在非易失性E2PROM CAT24C04中,LPC2478通过I2C接口来读写CAT24C04。另外在机器人运动轨迹调试过程中需要存储大量的数据,采用LPC2478集成的SD/MMC控制器将这些数据存储在SD卡中,这样就可以使用SD卡中的数据在PC上做机器人运动轨迹的离线分析。
软件系统
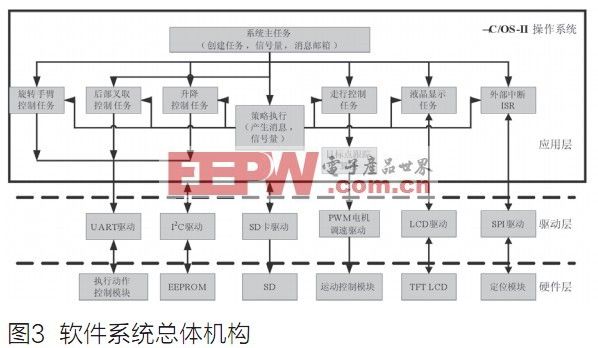
机器人的软件系统采用基于mC/OS II嵌入式实时操作系统的结构。图3描述了机器人软件系统的总体结构,整个软件系统按照操作系统层、应用程序层和驱动层三个层次进行设计。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码