轮式自动机器人控制系统
引言
自主移动机器人是指具有行动决策和规划,以及自动执行能力,集人工智能、智能控制、信息处理、检测与转换等专业技术为一体的系统。一般移动机器人都是基于行为的,机器人只有到达指定位置才开始执行其他动作,因此导航和定位是移动机器人研究的重要问题。本文采用陀螺仪和光电编码器的惯性导航方式,并且采用LPC2478构建整个控制系统,并在一台机器人上得以实现。
本设计的轮式自动机器人的控制系统主要分为主控模块、传感器采集模块、运动控制模块、执行动作控制模块和人机交互模块五个部分。传感器采集处理模块主要采集陀螺仪和编码器的信息并作初步的处理,构成机器人的感知单元,相当于机器人的“五官”。主控模块是机器人的智能单元,对采集到的外部信息进行分析处理并做出决策,相当于机器人的“大脑”。运动控制模块和执行动作控制模块是机器人的执行单元,相当于机器人的“四肢”。人机交互模块完成人对机器人的设置,并且能够显示机器人的运行状态,是人和机器人之间的“桥梁”。
硬件系统
硬件系统在设计时采用模块化的思想,为了提高系统的处理速度和并行工作能力,整个系统采用了一个包含多个处理器的可以并行工作的高效系统。每个模块都拥有独立的处理器使得整个系统很容易根据具体应用进行裁剪和扩展。
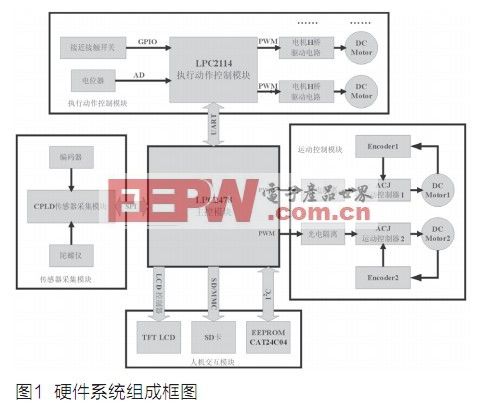
整个硬件系统组成如图1所示。硬件系统的所有模块在主控模块的控制下协调工作,主控模块采用NXP公司ARM7微控制器LPC2478,该器件具有丰富的通信接口,很容易将其他模块连接在一起实现集中控制。CPLD传感器采集模块将采集到的传感器信息通过SPI发送给主控模块。运动控制模块采用工业运动控制器,内部集成的DSP实现走行电机的闭环控制。执行动作控制模块采用LPC2114,通过UART来接收主控模块的控制指令,根据指令来控制执行机构完成相应的动作。
主控模块
主控模块是整个机器人控制系统的核心,集中控制系统的其他模块。主控模块需要接收传感器采集模块的信息,并对各种传感器的信息进行处理和分析,做出相应的决策来控制机器人的运动轨迹和执行动作。因此各个模块都需要连接到主控模块上,主控模块通过通信接口接收信息和发送指令信息,这就要求主控制器要有丰富的通信接口。LPC2478 ARM7处理器为这种多类型的通信应用提供了理想的解决方案。它包括4个UART接口、1个SPI接口、1个SSP接口、USB控制器等,丰富的串行接口使系统连接变得非常简单,并且给系统升级留下了空间。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码