一种基于AT89C51的腰椎牵引仪的设计
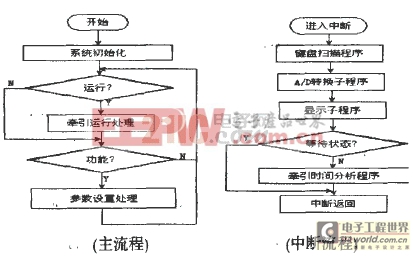
图6腰椎牵引器系统的程序流程图
主程序首先初始化,允许开放所有中断.并打开定时器中断。主程序随时等待并响应中断。在没有中断产生的情况下,运行检测程序,以检测系统是进人功能设定还是进入牵引电机运行处理状态。当有定时器中断产生时,程序跳转到定时器中断服务子程序。运行键盘扫描,数据采集,显示以及牵引时间分析子程序。当中断子程序运行完毕,返回主程序调用处。
3.1主程序设计
软件主程序是系统的监控程序.主要完成初始化.控制程序的流向.调用子程序等功能。其流程图见图6所示。上电复位后,程序开始执行。首先是初始化的工作.包括:
・A/D采样结果.BCD转换结果.拉力设定值这些存放单元的初始值设置;
・lO秒发生器计数器,定时开计数器,定时关计数器。总牵引时间计数器以及定时开预值,定时关预值,总牵引时间预值这些单元的初值没置:
・中断计数器值的设置,调整它可改变中断响应时间:
・20H单元中的各个位00H~07H赋0.电机控制端口P1.3置1(指示电机关),17H置1(指示定时关状态),0DH置l(设置等待灯亮):
・定时器0中断服务初始化:定时器工作方式以及其初值的设置
其次是检测位地址00H,判断电机是否开。如果有(00H=1)则执行电机牵引运行处理程序相应的功能。如果没有(00H=0)Hq到下一步.检测位地址01H,判断键盘上的功能键是否按下.如果有(O1H=1)则执行程序参数设置处理相应的功能。如果没有(01H=0)则返回到检测电机是否开。主程序循环执行。
主程序的流程较为简单,所需要的完成的功能都是由子程序实现。
4 结论
本文作者的创新点是设计了一种牵引力和牵引时间能精确控制且能实时显示。牵引过程能自动完成,患者在治疗过程中可以自行进行适当调节的腰椎牵引器。由于该系统硬件简单、成本低、集成度高、稳定性好、调试方便以及抗干扰能力强,并且能实现牵引力的自动控制.因而具有一定的实用价值,但投入实用化仍需改进,为真正促进智能型腰椎牵引器的应用,需要采用新器件以实现电路更加紧凑.改进牵引器的机械结构设计、加强仪器的可靠性等方面采取一定的技术措施,同时增加对牵引力保持阶段的牵引力检测。当出现偏离设定的数值时,能控制牵引系统进行自动补偿.这是值得探讨的问题。
通过实验测试系统检测传感器、控制执行机构、显示、报警等各功能正常,性能达到预定设计要求。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码