一种基于AT89C51的腰椎牵引仪的设计
2.2.1牵引力采集检测原理
牵引力采集检测以拉式负荷传感器为检测传感器,通过放大、AID转换器转换送单片机进行计数得到牵引力值。牵引器将传感器上所受到的拉力转换为与之成正比的电压值,传感器的应变电阻元件如图2所示.4片应变片初始阻值大小相等,采用差动布片和全桥接线。因为传感器在受到力的作用时,应变电阻Rl和R2阻值的变化方向一样,R3和R4阻值的变化方向一样.通过采用差动布片和全桥接线。可以精确地输出传感器所受力转换的电压值。传感器的差压输出经过放大器OP07和TL062放大后,将输出送入AID转换器进行数据的采样和处理。OP07是低漂移差动放大器。我们用其作为第一级放大。可以精确地对来自传感器小至10μV的输入进行放大,并很好的抑制共模信号的干扰;第二级放大我们采用双通道运算放大器TL062,利用第一通道构成电压跟随器在此电路中起降低噪声及缓冲的作用.所以OP07输出的信号经过此电路等比例地平稳地进入第二通道。利用第二通道对OP07的输出进行放大,并将第二通道的正端输入按图3接法.通过调节RW可以调节TL062的正端输入,来设置输出零点,使模拟部分的输出信号在A/D转换器的线性工作区范围内。
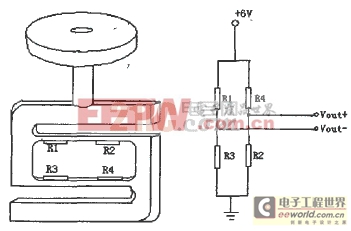
图2传感器内部结构图
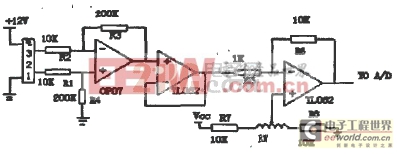
图3牵引力采集检测电路
2.2.2牵引力控制原理
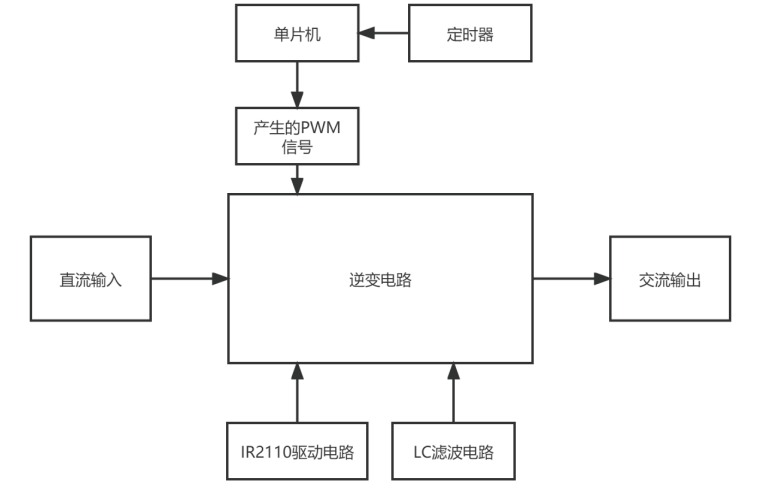
牵引力控制采用的控制机构由电机、牵引轮、棘轮继电器等组成,是一个小型的电力拖动系统,图4所示为电力拖动部分的机构图。我们采用电机通过传动方式拖动滚轮(称为牵引轮)转动,滚轮转动带动缠绕在其上的牵引带从而产生牵引力.以达到对牵引对象牵引的目的。图中.棘轮和牵引轮直接与电机主轴相连,通常。以电机作为动力进行拖动的电力拖动系统中.电机是通过某种自动控制方式来进行控制的,本装置中,我们同样采用单片机、继电器控制方式实现对电机的控制。为使牵引力保持.控制系统采用棘轮继电器来实现,即关断棘轮继电器.使得棘轮不能转动,这时电机输出的拉力处于保持状态。当输入设定的间歇牵引时间到时,接通棘轮继电器,放松棘轮,棘轮自由转动,牵引电机处于放松.牵引力处于撤消状态。当输入设定的间歇放松时间达到时.接通棘轮继电器、启动电机进入牵引运行状态。电机、继电器的控制电路如图5所示,电机启停控制信号来自P1.3引脚,继电器通断控制信号来自PI.6引脚。

图4电力拖动部分机构图
3 软件设计
本软件设计中,系统控制程序由主程序、中断服务程序和其它子程序组成。在设计中采用模块化程序设计技术,根据系统的功能,把整个程序按照各模块完成的功能分为:主程序、中断服务子程序、电机牵引运行子程序、功能设定子程序、显示子程序、数据处理子模块和牵引时问分析子程序等。系统的程序流程如图6所示.以中断的方式实现系统功能。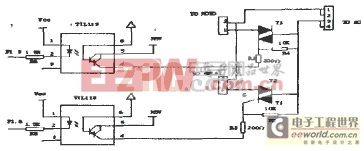
图5电机、继电器驱动电路

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码