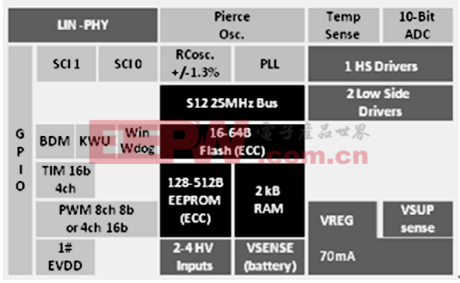
基于MC9S12XSl28微控制器的智能车硬件设计
考虑到MC33886输出电流有限,不能提供较为强劲的驱动力,因此专门独立设计采用MOSFET搭建的H桥驱动电路。网3是直流电机PWM调速系统框图。TD340和MOSFET管组成H桥驱动电路。TD340是N沟道功率MOSFET管驱动器。适合于直流电机控制。

通过实验比较这两个方案设计的电路加速、制动、频繁启制动能力,发现两个电路各有其特点。MC33886级联组成驱动电路驱动电流上升快,适合起制动,但能耗大且稳定电流小;而MOSFET管启制动较慢,但驱动电流大,适合直道行驶,功耗小。考虑到能耗问题,实际小车设计中采用MOSFET管驱动方法。
舵机用来控制前轮的转向,配合后轮的驱动电机,使车体能够自由行驶。在智能车上,舵机的输出转角通过连杆传动控制前轮转向。舵机的输出转角介于-45°~+45°之间,在使用前需先测出各个角度所对应的PWM波的占空比。
2.3 测速模块设计
作为实现对智能车闭环控制的光电一个重要环节,测速功能不可缺少。常用的测速方法有光电管测速法和光电编码器测速法。
实践证明,光电管检测方法成本低廉,容易实现。但精度较低,可靠性较差,容易受环境光影响,当车速达到3 m/s时,检测会发生问题。采用光电编码器成本虽然较高,但精度高,稳定性好。因此综合考虑,采用光电编码器检测电机速度。
采用OMRON公司生产的E6A2-CSl00型光电编码器。它由5~12V的直流供电,速度传感器通过后轮轴上的齿轮与电机相连,车轮每转1圈,速度传感器转过2.75圈。
2.4 图像采集及处理模块设计
针对智能车比赛的实际环境状况,常用的图像数据采集方法有:A/D转换采集方法和比较器的硬件二值化方法。
MC9S12XSl28单片机的A/D转换时间在不超频的情况下最短为7μs,若选用分辨率为320线的摄像头,则单行视频信号持续的时间约20 ms/320=62.5μs,A/D转换器对单行视频信号采样的点数将不超过(62.5/7)+1=9个。若使用分辨率为640线的摄像头,则单行视频信号持续的时间约20 ms/640=31 μs,A/D转换器对单行视频信号采样的点数将不超过(3l/7)+l=5个。可见,分辨率越高,单行视频信号持续的时间就越短,A/D转换器对单行视频信号所能采样的点数就越少。如前所述,摄像头的分辨率越高,虽然可提高纵向分辨能力,但会减少单片机A/D采样单行信号的点数,削弱横向分辨率。
摄像头的分辨率通常在300线以上,所以单行视频信号的持续时间最多20 ms/300=66μs,则A/D采样每行视频信号的点数最多(66/7)+1=10个(不超频),这不满足赛车定位要求。所以采用A/D采集图像时,摄像头分辨率不应太高。为保证采集图像点的准确性同时为图像处理留出更多时间,这里采用比较器实现二值化来代替A/D采样方法实现数据采集。
3 结论
围绕MC9S12XSl28单片机完成全国智能车大赛小车的硬件电路设计。通过实验比较各个模块电路的特点,选择性能较好的方案。通过硬件二值化电路完成对CCD摄像头图像采集与二值化的处理,节约了微处理的时间。通过比较常用的两种驱动电路的性能,选择出适合智能车竞赛的电路。实验表明整个小车驱动性能良好,图像采集快速,行驶稳定。该智能车在智能车大赛中表现良好。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码