基于MC9S12XSl28微控制器的智能车硬件设计
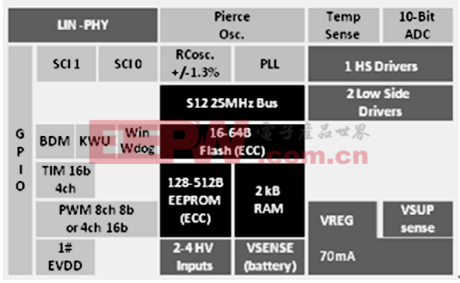
1.3 MC9S12XSl28单片机简介
本设计选用飞思卡尔MC9S12XSl28微控制器作为控制单元。该系统板具有MCU核心系统,支持串口调试下载,具有扩展接口,可进行2次开发,支持μCOSⅡ。此开发板兼容性较高,监控程序功能强大,可提供各种基本的开发和调试功能,如程序的下载和运行、断点设置、内存显示等。还可利用MC9S12XSl28的Flash在线编程技术实现在线写入用户程序和随时修改Flash存储内容。同时在线实时仿真和监测自编程序。根据实际设计需要分配控制器内部单元,如表l所示。

2 各功能模块的设计与实现
智能车硬件系统主要包括电源、电机驱动、测速、舵机、图像采集与处理等部分。
2.1 电源模块设计
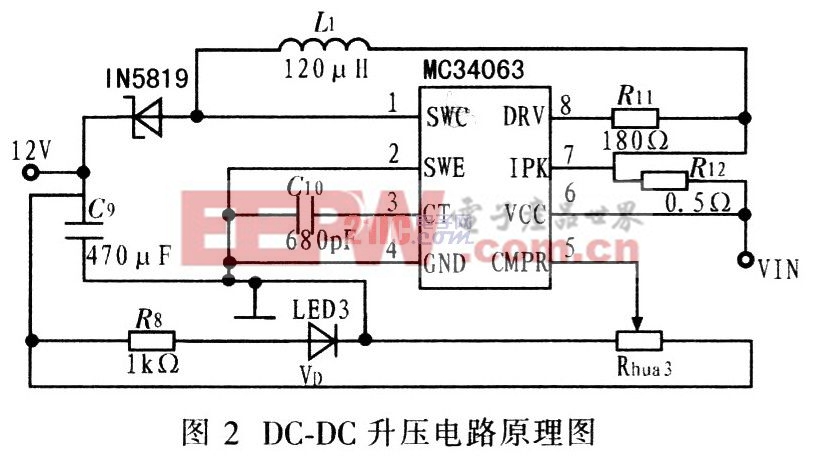
根据智能车的设计需求,需提供5 V电源为单片机、SD卡、测速模块、PCB板上电路、无线通讯模块等供电:6 V电源供给舵机,CCD摄像头需12 V的工作电压。其中的难点是12 V DC-DC升压电路。这里使用MC34063A搭建由7.2 V升压到12 V的升压电路。MC34063A是单片双极型线性集成电路,专用于直流一直流变换器控制,内置占空比周期控制振荡器、驱动器和大电流输出开关,可输出1.5 A的开关电流。它能使用最少的外接元件构成开关式升压变换器,降压式变换器和电源反向器。图2为DC-DC升压电路原理图。
2.2 电机及舵机驱动模块设计
影响智能车速度的最关键因素是驱动力。“驱动力”不仅包括驱动电机,还包括电机驱动电路。电机驱动电路要能为赛车提供强大的动力,同时自身的功耗要小,能够保证在长时间大电流输出的情况下不升温且持续稳定工作。
根据PWM调速电机驱动电路的性能指标。在实际制作过程中,主要采用以下两种方案:1)采用MC33886级联组成驱动电路;2)采用MOSFET搭建H桥电路。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码