基于神经网络的自适应滑模逆控制器设计
在导弹飞行控制中,由于参数变化剧烈, 和 无法准确得到。RBF[6]神经网络对非线性系统具有唯一最佳逼近的特性。所以,构造RBF神经网络,使其输出 和 来逼近 和 。RBF网络模型如图1所示: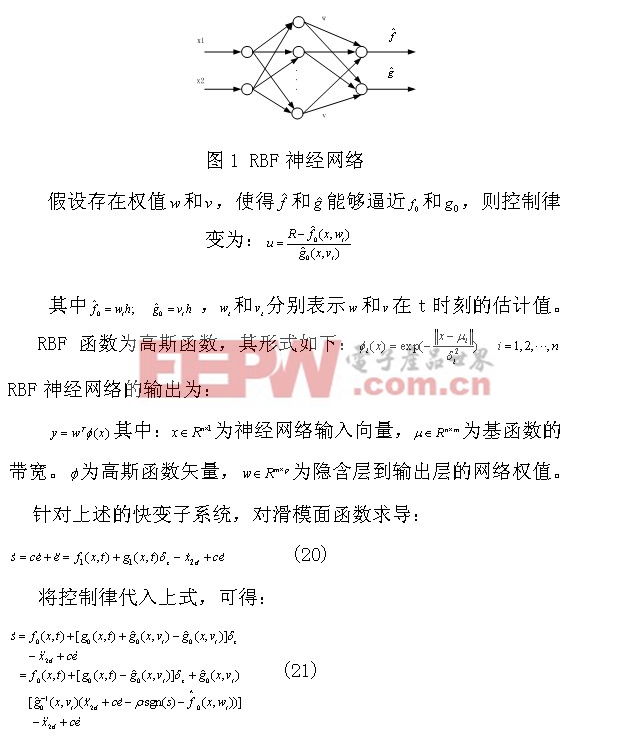
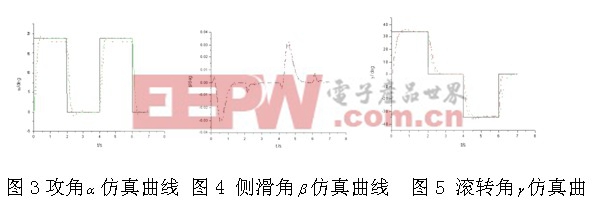
5、仿真结果分析
5、仿真结果分析
6、结论

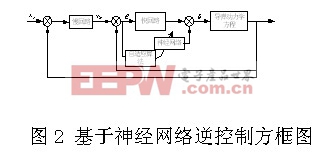
基于导弹非线性控制模型,应用时标分离动态逆方法设计了一种非线性导弹控制系统。该方法通过引入神经网络,将动态逆方法与自适应滑模控制相结合,有效的消除了建模误差对整个系统的不利影响,增强了控制系统的鲁棒性,适合于复杂的导弹控制系统设计,具有良好的应用前景。
1
2
加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码

