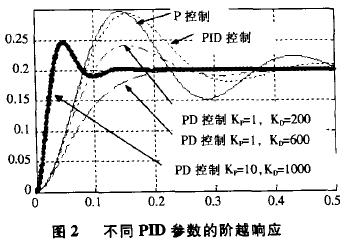
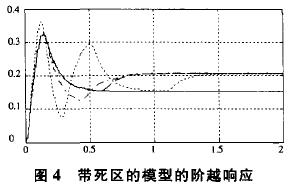
分析图2可得出: ① 对于理想的数学模型,不需要积分控制项,只采用PD控制就够了。由于积分控制项的目的只是消除静差,所以在系统没有静差的情况下不要加入积分控制环节,因为积分控制环节会恶化过程动态特性,造成过大的超调量,并增加了调整时间; ② 不要忽视微分控制环节。要减小上升时间,增加系统的控制刚度,必然要求增加Kp,但过大的Kp会产生过大的超调,甚至使系统振荡,但增加Kp的同时只要增加KD一般都可以减小超调,获得较好的动态特性。可以这么说,理想的数学模型,采用大参数的PD控制可以获得足够好的控制性能。但也不是说可以一味的增加KP和KD的值,因为KP值越大,控制量u也越大,消耗的能量也越多,而且u受饱和限制。 运用PD控制在实际转台系统中时,有较大的稳态输出误差,并且输出波动较大。分析原因如下: ① 由于功率放大器有较大的死区,而且转台的机械系统存在有静摩 擦力,使实际的被控系统有较大死区。所以控制器如果没有积分环节,稳态输出有较大的静差; ②实际的被控系统总是会受到许多干扰,包括各种不确定的系统噪声和量测噪声。过大的KD会放大噪声,使系统的输出波动较大。