基于CAN总线的车灯控制系统设计方案
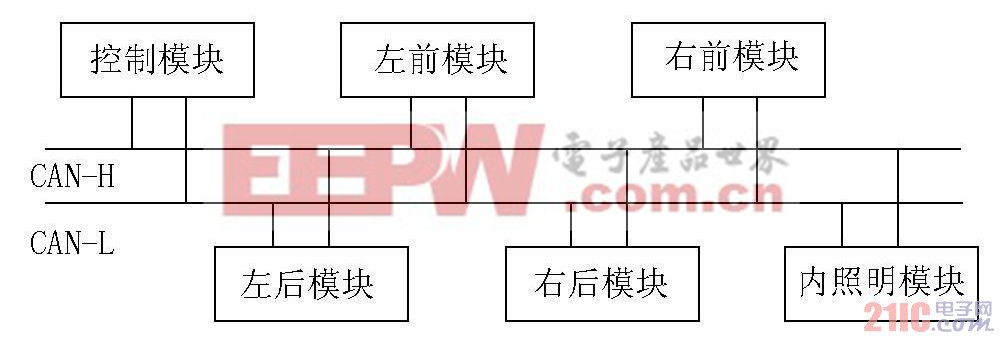
图2 CAN 总线车灯系统结构
2 硬件设计
本设计以8051 单片机和Intel 82527 CAN 总线控制器为核心构成智能节点。其中, Intel 82527 CAN控制器支持CAN2. 0 标准, 包括标准的和扩展的数据和远程帧, 可程控全局屏蔽; 包括标准和扩展信息标识符, 具有15 个报文缓冲区, 每个数据长度为8 字节;14 个T X/ RX 缓冲区, 1 个带可程控屏蔽的RX 缓冲区; 可变CPU 接口, 具有多路8 位总线( Intel 或Motorola 方式) 、多路16 位总线、8 位非多路总线( 同步/ 异步) 以及串行接口; 位速率可程控, 并有可程控的时钟输出; 可变中断结构; 可对输出驱动器和输入比较器结构进行设置; 2 个8 位双向I/ O 口; 44 脚PLCC 封装。
本方案选用Philips 公司的PCA 82C250 为CAN总线收发器和物理层总线接口, 它可以提供对总线的差分发送和接收、高速斜率控制和待机3 种不同工作方式, 能够隔离瞬态干扰, 提高接收和发送能力。在硬件设计中, 82527 完成与CAN 总线的信息交换,8051 完成对车灯继电器的驱动; 旁路输入比较器, 与8051 的信息交换采用中断方式, 地址为7F00 ~7FFFH.系统硬件结构见图3.
3 软件设计
CAN2. 0B 协议只制定了CAN 物理层与数据链路层的协议, 在进行系统设计时, 必须根据用户的需要制定相应的CAN 应用层协议。根据总线系统各节点及其所要实现的功能, 确定相互间共享的数据, 然后了解各节点需接收和发送的信息, 统一制定CAN 网络中需传输的信息, 最后给制定好的CAN 网络传输消息分配标识符。CA N 协议规定, 标识符ID 越小, 优先权越高,因此, 在确定ID 时, 先要分析该信息帧需求的紧急性。
将汽车车灯位置分布和行驶安全性要求作为各模块划分的依据, 以控制模块、左后模块、右后模块、左前模块、右前模块、内照明模块为顺序分配ID.
信息编码是把相近或相关的信息组合成一个数据块, 使它们的数据可按同样的频率从控制节点发送到总线上。其它CAN 节点可同时获得这组信息, 并对该信息进行相应的处理。本车灯控制系统通过主控制器发送信息, 各分节点先通过验收/ 屏蔽滤波器接收自己需要的信息, 屏蔽不需要的信息, 再根据接收内容进行相应操作。其中4 个分节点均设置为单滤波, 主控制器发送的1B 数据中各位的含义见表1.
4 试验及结论 按前面所介绍的硬件和软件设计方案, 在试验室完成车灯控制系统, 组合成车灯台架, 通过对该系统硬件、软件的反复调试进行控制试验。台架试验结果证明, 本车灯控制系统的设计方案可行, 减少了线束的使用, 且性能可靠, 具有较好的工程应用前景。由此也可以预见, 随着CAN 总线在汽车电气控制方面的广泛应用, 汽车的使用性和可靠性等方面也将会得到很大的提高。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码