分布式汽车车身控制系统设计
电压调整单元将汽车内24V电压转换成5V电压供给单片机、功率芯片等。
微处理器控制单元(MCU)采用Motorola的MC68HC908GZ16和MC68HC908GR8,主控模块的微处理器控制单元采集输入的开关状态,完成相应的控制,将控制命令通过串口送给各子模块,同时根据各子模块反馈的负载的状态判断是否存在故障,若有故障则报警显示。各子模块的微处理器控制单元完成对负载的驱动,并采集负载的工作状态发送给主控模块。
开关状态检测单元将开关状态的24V电压转换成5V后,将此并行数据转成串行数据给MCU,这样可大大减少了所需的MCU引脚数量。
功率驱动单元由功率芯片和串行数据转并行数据的芯片组成,功率芯片代替了传统的继电器,许多汽车负载不能被MCU或低电流接口器件直接驱动,而功率芯片可通过MCU控制输出大电流来驱动各种负载。各子模块可根据所带负载来选择不同的功率芯片,驱动阻性负载选用了MC33286和MC33888,驱动感性负载选用了MC33289。MCU通过I/O端口将控制命令串行输出,通过串行数据转成并行数据的芯片送给功率开关。
故障显示单元用三个发光二极管表示三个子模块,若子模块出现故障,相对应的发光二极管会点亮,同时蜂鸣器会报警。同时子模块上也用发光二极管来表示子模块所驱动的负载的状态,这样可非常直观地看出子模块上哪路负载出现开路、过流、过温、过压等的故障。
本系统采用LIN总线的通讯方式。LIN总线基于通用的SCI/UART接口的,其成本要低于CAN通讯。LIN可以作为CAN通讯网络的辅助。LIN总线主要应用在不需要CAN的性能、带宽及复杂性的低速系统,如
nbsp; 开关类负载或位置型系统包括车的后视镜、车锁、车座椅、车窗等的控制系统。LIN更有助于实现汽车中与CAN网络连接的分布式控制系统。LIN以其低成本的优势成为车身控制系统网络的首选。
系统的通讯由主控模块控制通讯顺序,LIN的数据帧是按数据内容定义的,而不是数据的目的地址。这样定义可使多个节点收到同样的信息,并且数据能够以多种方式交换。数据可以从主节点发送到一个或多个从节点,也可以通过从节点发送给主节点或其他从节点。因此从节点之间通讯并不需要经过主节点,并且主节点可以将信息广播给网络内的所有节点。本系统中数据通讯主要是主模块向三个模块发送控制命令和三个子模块向主模块反馈的故障状态数据。本系统定义了几种数据类型,一种是三个模块各自接收的数据,另一种是前模块和后模块同时接收的数据,第三种是三模块同时接收的数据,第四种是三模块各自独立发送的数据。通讯过程见系统软件流程。
汽车上电磁干扰较厉害,对系统的抗干扰能力要求较高,系统在硬件和软件上进行了抗干扰设计。在硬件上,通讯线路上采用了光电隔离电路,电源也采用DC-DC隔离。在电源和地之间设计了一个去耦电容,它可以滤掉来自电源的高频噪声。在印刷线路板的布局上,将数字电路和功率驱动电路合理分开,使相互间的信号耦合减少到最小。在软件上,系统采用了看门狗技术,从而增加了系统的可靠性。 系统软件流程图示于图4。
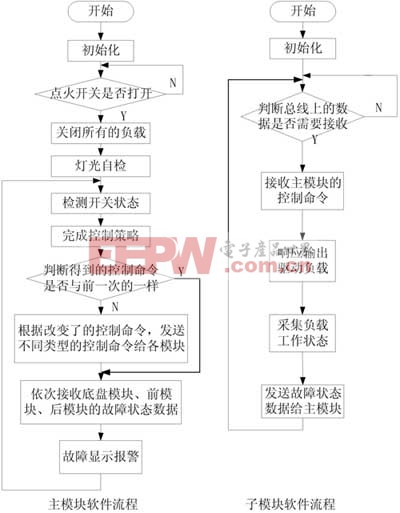
图4 软件流程图
结语
本设计方案实现了系统的基本功能,且结构简单成本低,该设计思想同样适用于轿车和中型车辆。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码