基于静压传感器MS5534B的无人机高度测量系统设计
为了进一步提高精度,可以采用非等距分段法,根据函数曲线形状的变化率的大小来修正间隔点间的距离。曲率变化大的部分,距离取小一点,而在曲线较平缓区域距离取大一点。
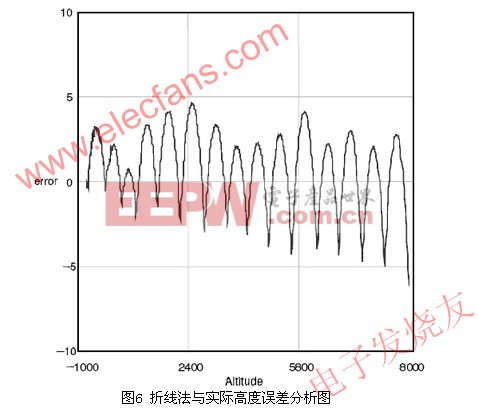
图6为在海拔-700m~8000m时,运用Matlab仿真折线拟合法所得海拔高度与我国标准大气压对照高度误差示意图,在-700m~8000m时最大高度误差为+/-5m,而在-100~1000m时的误差在+/-3m以内,适合小型无人机的高度需求。
4.结论
在自行研制的无人机自动驾驶仪上,应用了上述的基于MS5534B的气压高度测量系统,在实际多次飞行任务中测试的效果良好,定位高度准确。本文针对小型无人机自动驾驶仪微处理器浮点运算能力不强,实时性要求高的特点,提出折线线性拟合的方法,减少了大量浮点运算,提高了运算效率,节省了宝贵的RAM存储空间,适合于小型无人机的自动驾驶仪中。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
