一文读懂自动驾驶传感器之激光雷达、毫米波雷达、超声波雷达及摄像头
本文系统介绍高级驾驶辅助系统(ADAS)和自动驾驶所需的激光雷达、毫米波雷达、超声波传感器和摄像头传感器的原理、功能及区别。
传感器的种类及特征
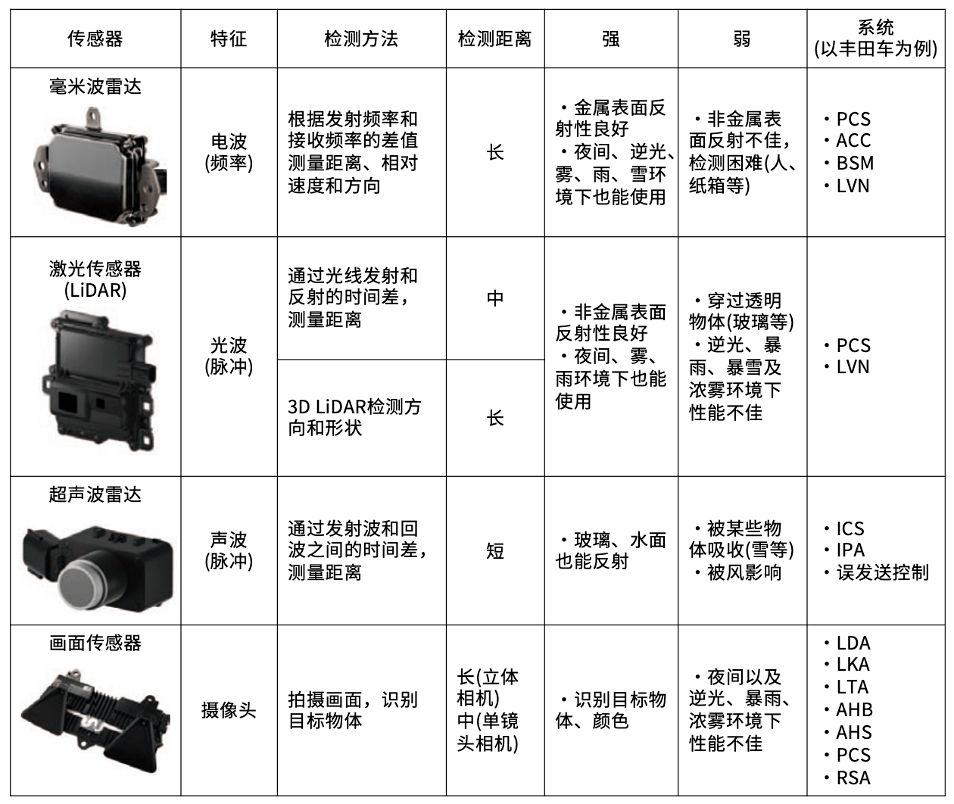
毫米波雷达的原理和功能
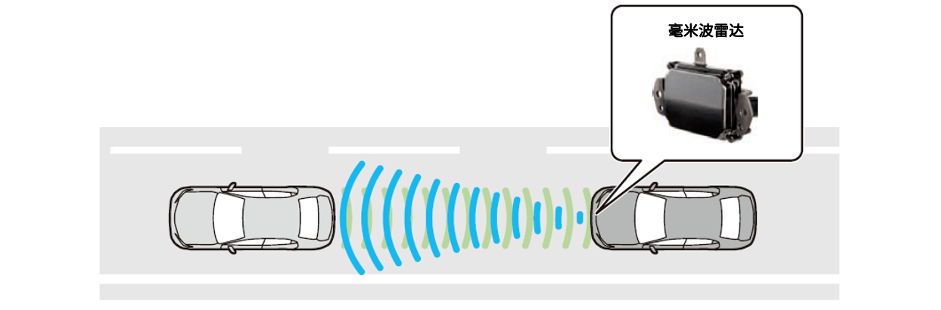
毫米波雷达是通过毫米波段的电波测量距离、相对距离、方向等的雷达传感器。在驾驶过程中向前方发射毫米波段的电波,若前方有车辆,则可收到反射回来的回波。通过分析检测到的反射波频率变化等,检测前方及对面是否有车辆、与前方及对面车辆间的距离、相对速度和方向等。
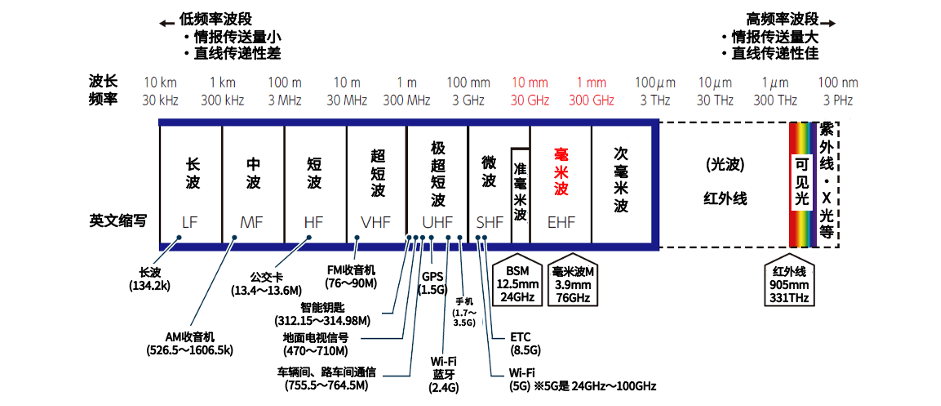
1、毫米波雷达的分类
车辆上搭载的毫米波雷达通常使用两个波段。毫米波雷达使用的是76GHz波段的电波(毫米波*1)。BSM使用的是24GHz波段的电波(准毫米波)。
2、毫米波雷达的构成
毫米波雷达是由天线板、通信及电源模块等构成。
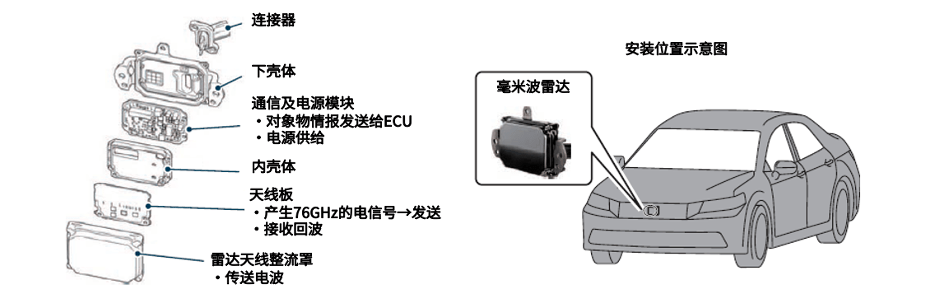
3、毫米波雷达的原理
通过FM-CW方式*2监测距离、相对速度和方向。
激光雷达的原理和功能

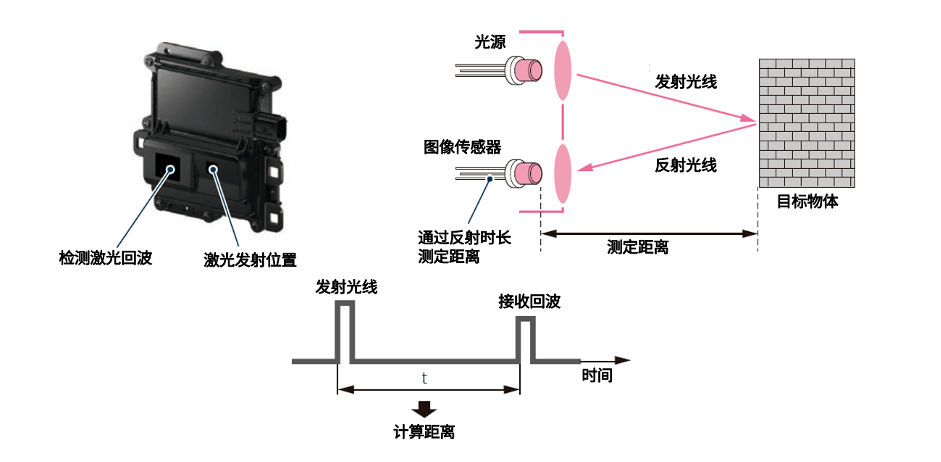
激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达。通过向目标发射探测信号(激光),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,从而获得目标的距离、方位、速度等相关信息。
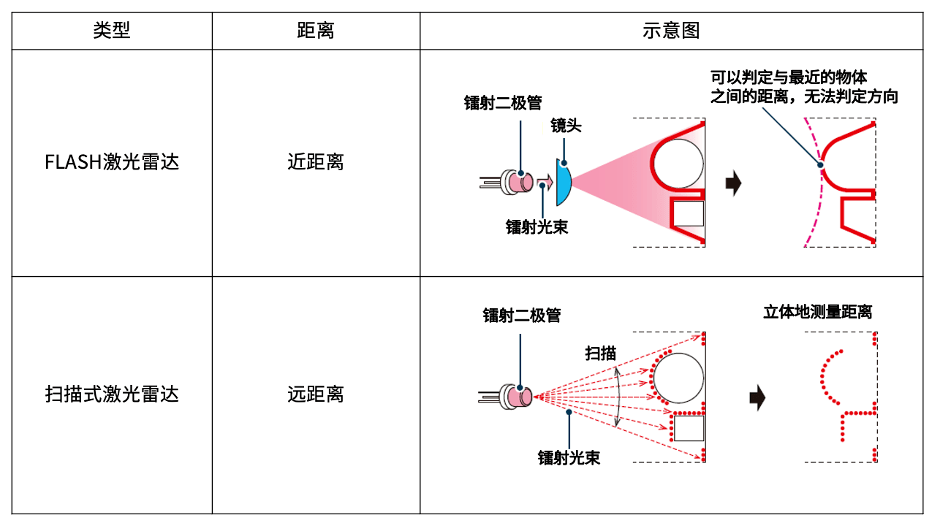
1、激光雷达的分类
针对测量距离的远近,激光雷达可分为非扫描式(FLASH)激光雷达和扫描式激光雷达。
2、摄像头传感器如何工作?
摄像头传感器通过获取摄像头拍摄的车辆周边的实景画面,从实景画面中抽取场景特征信息、调整显像浓度,对画面进行预处理。根据预处理结果,更容易辨别对象的特征及形状、颜色等信息,从而提高检测速度。
3、FLASH激光雷达
在短时间内向前方发射大面积的激光,依靠高灵敏度的探测器对回波信号进行收集并绘制成像。
4、扫描式激光雷达
被称为自动驾驶领域中必不可少的传感器。它可对车辆自身位置和目标物体之间的距离以及目标物体的形状进行分析,也可对包括行车道白线在内的道路形状等进行识别。
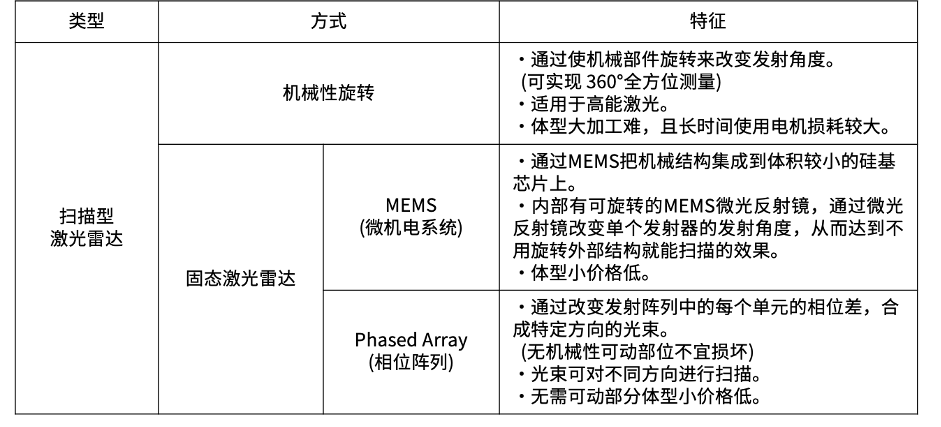
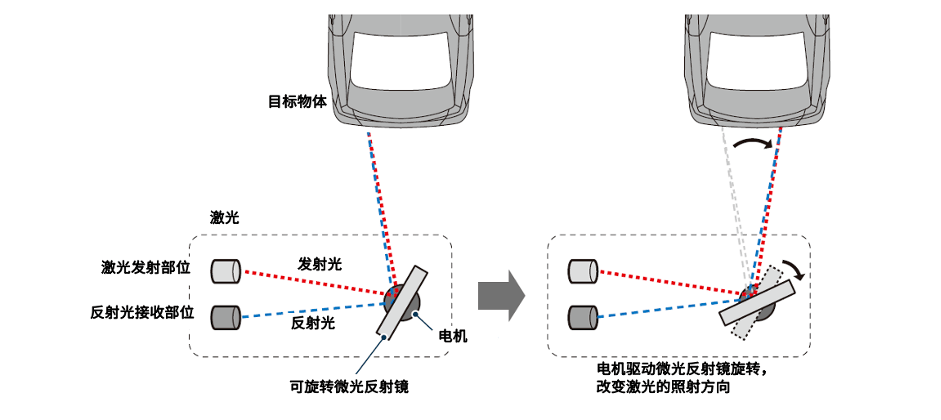
5、MEMS激光雷达
MEMS(Micro Electromechanical System)即微机电系统,是指尺寸在几毫米乃至更小的高科技装置,其内部结构一般在微米甚至纳米量级,是一个独立的智能系统。
MEMS微光反射镜是指采用光学MEMS技术制造的,把微光反射镜与MEMS驱动器继集成在一起的光学MEMS器件。MEMS微光反射镜的运动方式包括平动和扭转两种机械运动。
通过可旋转MEMS微光反射镜改变发射光束的方向,对特定范围进行扫描。目标物体会反射扫描光束,接收部件会识别反射光。通过发射激光和接收到反射光的时间,可以测定与目标物体间的距离以及目标物体的大小。
超声波传感器的原理和功能
超声波传感器能被任何材质的障碍物所反射,并接收和放大障碍物反射的超声波脉冲,将超声波脉冲转换成数字信号。
因此超声波传感器一直被广泛地应用在汽车上,为驾驶员的安全出行提供辅助。
*参考:超声波所在频段人耳无法听到。
1、超声波传感器的构成
超声波传感器,由超声波喇叭、用于处理影像和计时的芯片等零部件组成。
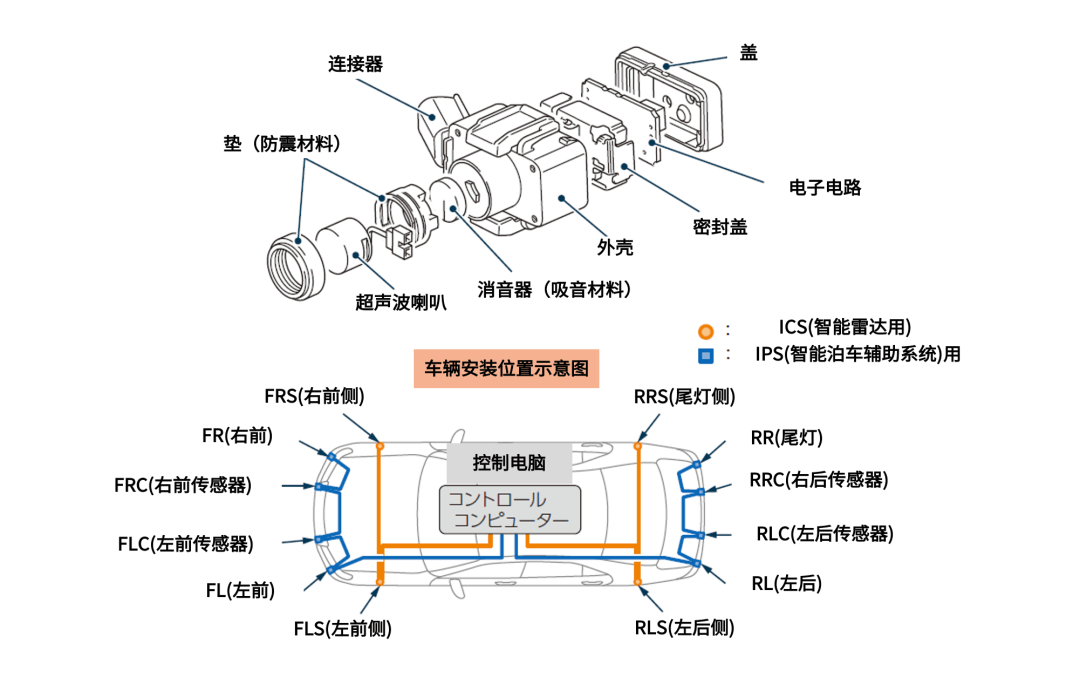
2、超声波传感器如何工作?
超声波发射器发出超声波,超声波遇到障碍物会返回,超声波传感器正是根据发射波和回波之间的时间差来测定发射点到障碍物的实际距离。

3、怕脏的超声波传感器
但是强大如超声波传感器可是很怕脏污的,应始终保持表面干净。因为当其被异物附着时,超声波喇叭的震动(残响时间*1)会发生异常。例如超声波喇叭上附着霜(冰)、雪、泥等异物时,会影响超声波喇叭的正常功能。
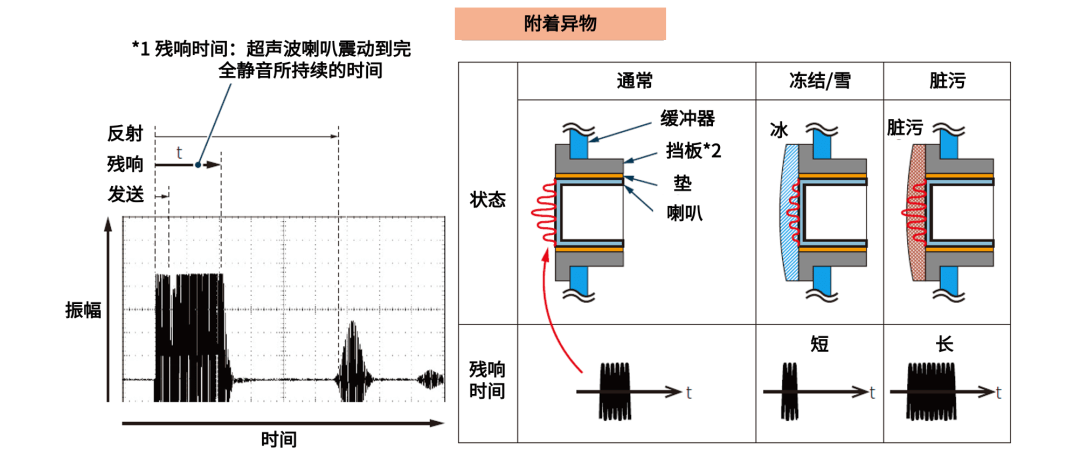
*2参考:挡板即护圈(保护零件),相当于超声波传感器嵌入车辆的缓冲器。
摄像头传感器的原理和功能
摄像头传感器,顾名思义就是通过摄像头拍摄车辆周边场景,并以此来识别车辆、行人、行车线等的传感器。从拍摄到的影像可以检测出车辆及车灯、行车道的白线及标识、行人及自行车等。
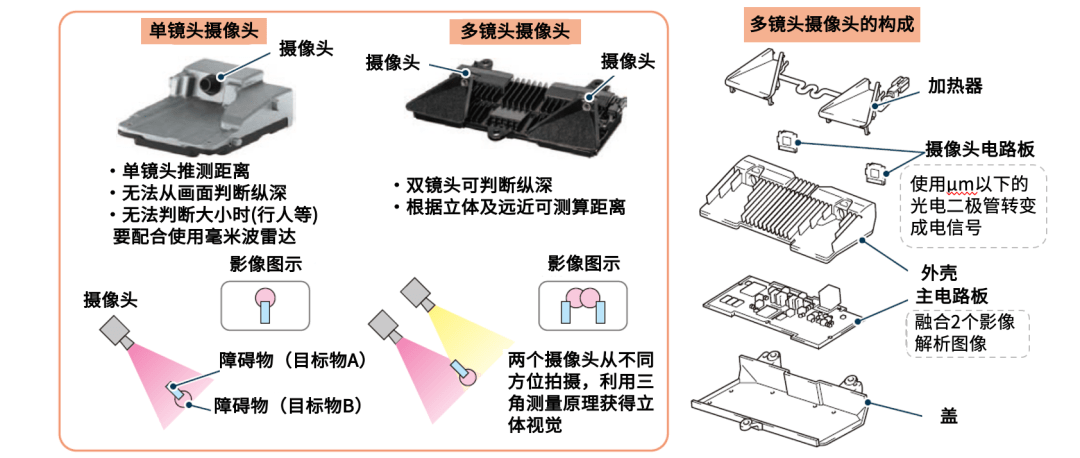
1、摄像头传感器的分类和构成
摄像头传感器分为单镜头摄像头和多镜头立体摄像头两种。单镜头摄像头识别的是平面影像,而多镜头立体摄像头内置2个摄像头,除了可以识别立体物体,还可以测算到目标物体的距离。
*参考:投影点坐标的位置不精确会影响检测精度。请确保镜头已得到充分的校正、调整。
2、摄像头传感器如何工作?
摄像头传感器通过获取摄像头拍摄的车辆周边的实景画面,从实景画面中抽取场景特征信息、调整显像浓度,对画面进行预处理。根据预处理结果,更容易辨别对象的特征及形状、颜色等信息,从而提高检测速度。
3、目标物体处理流程
图像传感器通过图像处理识别对象物体,根据驾驶辅助ECU检测到的信息进行内容识别、判断、控制车辆。
4、检测车道
从经过处理的图像上抽取边缘画面(亮度变化大的区域),从边缘画面中找出行车线标记(车道两侧的实线及虚线,直道显示为直线),通过行车线标记测定车道。
基于行车线信息获取车道中央位置、车辆行进方向及测算距离,从而识别、判断、控制车辆。
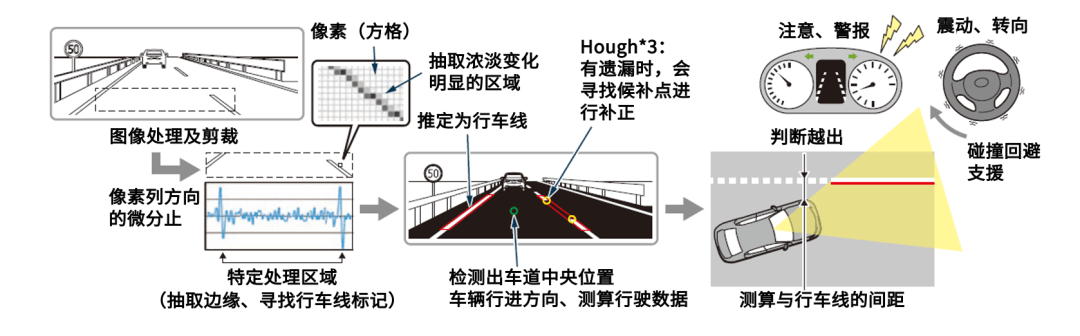
※参考3:Hough (霍夫变换)用于检测图像中的各类曲线(如直线、圆、抛物线、椭圆等),并以一定的函数关系进行描述,应用于影像分析、模式识别等很多领域。
5、检测道路标识
从经过处理的图像上抽取对应的候补点,寻找由各点分布构成的直线、曲线、平面等任意图形,按照特定的模板推定标识。通过标识信息进行判断并控制车辆。
6、检测行人
人物图像由于体型、姿势、衣着等因素影响较难识别。因此,从图像中区分出静止的背景和运动的人物,需要根据模型化部位(手脚等较大部位的图形)以及统计性特征(全身图像等)进行识别,符合特征的则被判定为行人。根据车辆与行人间的位置关系及测算的距离,识别、判断、控制车辆。
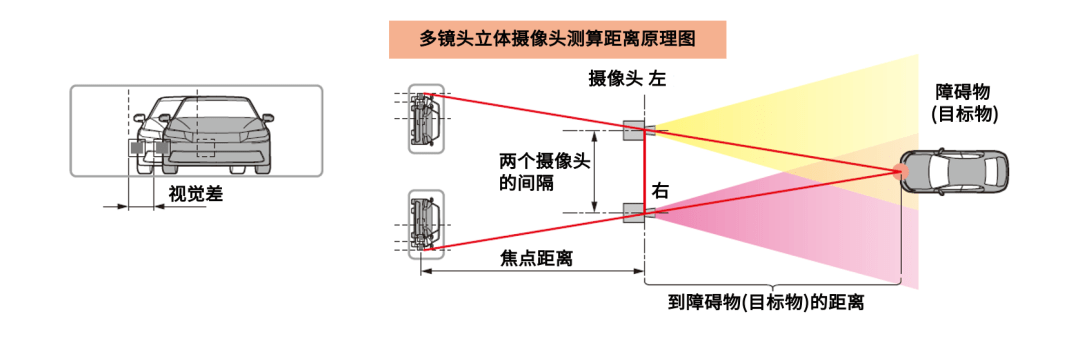
7、多镜头立体摄像头
单镜头摄像头拍摄到的某一个图像,在转化成二次元画面时,由于缺少目标物体纵深数据导致无法进行立体识别。而多镜头立体摄像头融合了2个摄像头拍摄的图像从而获得视觉差,并利用视觉差使用三件测量的方式计算出纵深数据。因此,立体地识别目标物体的大小及形状
写在最后
除雾降温不可少
确保摄像头视野,图像传感器和镜片密封玻璃(前置摄像头)间配备镜头加热器。通过监控车外温度,镜头加热器加热除雾。当摄像头前方视野模糊时,图像传感器将停止工作。
另外,车辆在酷热等环境下停放后,图像传感器的温度会变得很高,可能会影响识别功能甚至过热停机。(温度降低后将正常工作)

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码