在PSoC4平台上开发传感器BLDC电机控制系统
PSoC4内部集成有支持比较器模式的运算放大器(Opamp)和可编程IDAC电流源,因此对电机电流的监控也可以完全集成到PSoC4片内完成,而不需要任何外部有源器件。电机电流经采样电阻后进入片内Opamp,放大后作为片内比较器的正端输入,比较器的负端输入为片内IDAC电流源产生的过流阈值基准。比较器输出的跳变将直接关断PWM输出,保护电机。
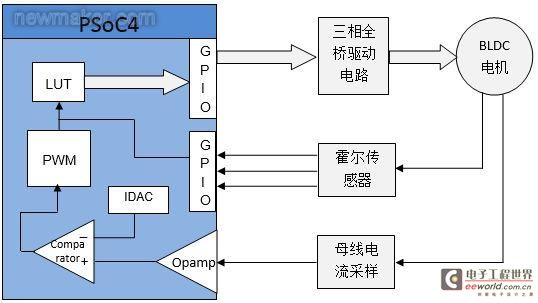
图4:基于PSoC4的无刷直流电机控制框图
对比基于PSoC4的控制方案和当前市场上的主流商用方案我们不难发现,PSoC4由于集成了丰富的片内模拟和数字资源,可以完全用片内的硬件来完成无刷直流电机的顺序换相和电流监控,比软件实现更加快速可靠,且节省了可观的片外有源器件的成本。此外,片内的UDB还可以直接检测霍尔传感器的失效状态,并迅速保护电机,这也是其它厂商所不具备的重要功能。
5. 基于PSoC4 的无刷直流电机控制系统设计实例
① 控制原理图设计
依据图4的控制框图,我们设计了图5所示的在PSoC Creator环境下的BLDC电机控制原理图。
霍尔信号经I/O引脚后直接输入UDB换相逻辑表LUT_Cmut直接驱动三相全桥电路,完成电机的硬件换相。同时霍尔信号也同步输入另一个UDB逻辑表LUT_Spd,实现霍尔传感器的失效状态检测并完成电机的速度检测。
电机电流经采样电路后输入片内运放Opamp_1,经运放和滤波后输入片内比较器,与片内IDAC产生的过流阈值基准进行比较,反转后将直接关断PWM输出,通过换相逻辑表LUT_Cmut来使电机断电。
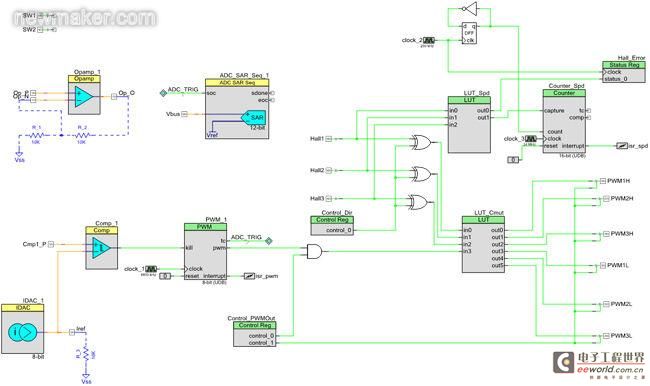
图5:步进电机控制原理图
② 控制系统软件设计
由于采用了PSoC4片内硬件进行换相、霍尔失效检测和过流检测保护,因此系统的的软件设计较为简捷,只需读取用户命令和完成速度闭环调节等即可。
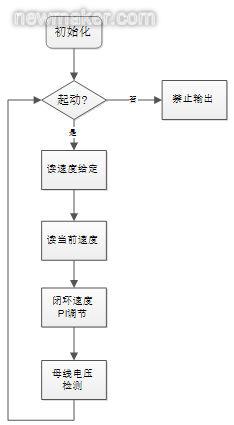
图6:主程序流程图
图6为控制系统主程序流程框图。
控制主程序首先初始化和配置PSoC4的内部资源,在主循环中首先检测用户的起停命令和速度给定,在执行速度闭环PI调节。最后检测母线电压状态。
③ 控制系统实验结果
完成系统前述的系统原理图和程序设计后,在PSoC Creator环境下编译BLDC电机控制工程,并连接PSoC4开发板,三相全桥驱动板与BLDC电机,通电后电机可正常运行。图7显示电机运行在4000RPM时的霍尔信号与三相绕组反电动势波形。通道1,2,3分别为相绕组A,B,C反电动势波形。
由图可以看出,BLDC电机运行稳定,反电动势为标准的梯形波。

图7: 三相霍尔信号与绕组反电动势波形
6. 小结
本文主要介绍了如何在Cypress推出的PSoC家族的最新成员PSoC4平台上开发有传感器BLDC电机控制系统。本文的设计过程说明,PSoC4片内集成的丰富资源使BLDC电机的换相和霍尔失效检测都可以由内部硬件来完成,简化了控制系统的软件设计并提高了可靠性。此外,片内集成的运放和比较器将电流检测和保护也放在芯片内部完成,使过流检测反应速度更快并进一步降低了成本。因此,用户可以使用PSoC4设计出具有优异性能和较低价格的有传感器BLDC电机控制系统和产品。(end)

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码