一种基于压力传感触控技术的智能地板
2.2定位平台的设置
定位平台由16个传感器和4块玻璃板组成,总面积为70×70 cm2,分为4个单元。传感器采用轮辐式压力传感器(型号为BK-4)。传感器自身集成有电桥,对外有4条引线,分别为电源Vbg、GND、信号+和信号-.由于传感器输出的信号微弱(μV~mV级),因此需要对信号进行放大。本系统采用的放大器为AD623.
为确保定位的准确,定位平台需要调平。当定位平台不平时,即当传感器高度不一致,在图1所示的四支点定位模型中可能会有1或2个支点处于不受力的悬空状态,即“虚腿”现象。“虚腿”现象将改变四支点平台力的分布,从而不能应用四支点公式求重心位置。周祖濂通过数学模型证明了在四支点结构中的四个支点能够同时受力,即“虚腿”现象可以通过调平来避免。
四支点平台的简单调平通常采用向最高支撑靠拢的方法,即通过垫片调节4个支点中高度较低的3个,使其与最高支点高度一致从而调平台面。本系统通过在传感器下垫纸片的方法调平定位平台。
3系统软件设计
本系统上位机开发平台采用NI公司推出的LabVIEW 2013.设计的软件界面如图3所示。
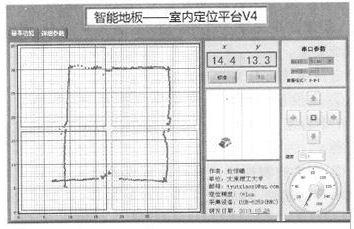
图3软件界面
3.1定位显示模块
定位显示模块的输入为16个压力传感器的数据,经过滤波和计算,输出为定位平台上物体重心的位置。位置显示方式包括文本坐标和二维图片,路径显示方式为XY图。定位显示流程如图4所示。
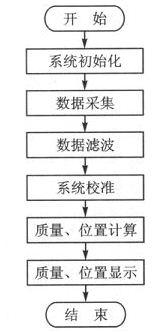
图4定位显示流程
3.2运动控制模块
运动控制模块是通过在PC机和小车间建立蓝牙通信实现的。不具备蓝牙功能的PC机可通过蓝牙适配器和BlueSoleil软件实现蓝牙功能,小车端通过UART接口连接一蓝牙透传模块,此时,PC机端和小车端建立了虚拟串口连接,LabVIEW端通过VISA串口通信编程实现向小车发送运动指令。本模块可完成对小车的速度控制以及前进、后退、左转、右转、停止5种运动状态控制。
3.3远程监视模块
远程监视模块中,PC机为位置管理服务器,Android终端为客户机,网络架构采用分布式Publisher-Subscriber模式,PC机为所有注册的Android终端提供位置查询服务。
关键词: 触控技术

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码