基于AT89S51单片机的PID温度控制系统设计
2.5声光报警电路模块
某一通道的温度测量值超出预先设定的上、下限报警值或系统运行出现故障时,系统发出声光报警以提醒用户注意。如图5所示。

图5声光报警电路图
3.系统软件设计
3.1系统主程序设计
在反应器系统中,主程序的功能主要是设定程序执行过程中用到的相关变量,分配寄存器,对所需要的参数初始化,根据定时中断程序,调用相应的功能模块,完成一定的任务。
3.2系统子程序设计
3.2.1显示子程序
LED显示方式包括有静态和动态显示两种,动态扫描显示电路是将显示各位的所有相同字段线连在一起,由一个8位I/O口控制,而每一位的公共端(共阳或共阴COM)由另一个I/O口控制。由于这种连接方式将每位相同字段的字段线连在一起,当输出字段码时,每一位将显示相同的内容。因此,要想显示不同的内容,必须采取轮流显示的方式。
3.2.2定时子程序
定时程序主要是用于完成查表的占空比控制。总体思想是根据控制表中占空比控制变量U的不同取值,采用不同的定时来改变继电器的通断,根据继电器的特性,要求不能频繁通断,所以通断要有一定长的时间,但又要考虑到控制能够及时的根据新的采集值和设定值的变化来做出相应的动作。
4.控制方案
4.1 PID控制
PID控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差,将偏差比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
4.2 PID参数整定
由于PID控制器的输出为系统偏差的比例、微分和积分作用后的线性组合,所以调整各个部分的线性系数就是PID控制器控制性能好坏的关键。必须针对具体被控对象对PID控制器参数进行整定,采取扩充临界比例度法:
(a)选择合适的采样周期T.所谓合适是指周期足够小,一般应选它对象的纯滞后时间的1/IO以下;
(b)仅让控制器作纯比例控制,由小到大逐渐增大比例系数Kp,直至使系统出现临界振荡,记下此时的临界振荡周期Ts和临界振荡增益Ks;
(c)选择合适的控制度。所谓控制度,就是数字控制器和模拟调节器所对应的过渡过程的误差平方的积分之比;
(d)根据控制度查表。
4.3 Matlab仿真
通过对上述的整定方法的综合运用,整定后得到PID控制器的参数为:Kp=1.75,Ki=0.0125,Kd=3,在MATLAB/Simulink环境下建立温度控制系统的仿真模型,如图6示。仿真后得到系统阶跃响应曲线。
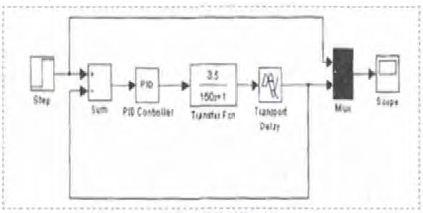
图6仿真模型
仿真后得到的系统阶跃响应的动态性能还是比较理想的,超调很小(响应峰值为1.017,超调量Q%=1.7%)。统的响应误差是也是比较小的(稳态误差为0.005),在系统要求的精度范围之内。
5.总结
系统采用模块化设计,扩展性强。模块化设计,使控制器具有一定的通用性,而且运行安全可靠。成本低,操作简单,体积小,安装方便,反应灵敏,控制精度高。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码