基于DSP的稳定平台伺服系统的设计研究
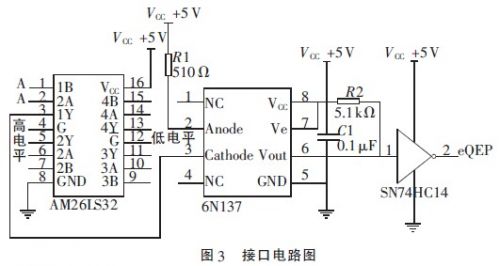
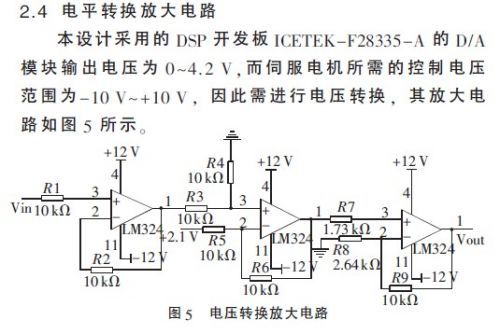
由于DSP开发板输出阻抗较大,有分压导致衰减损耗严重,因此放大电路前需加一个电压跟随器,起到阻抗匹配作用,从而使后级放大电路能够更好地工作。
3 伺服系统的软件设计
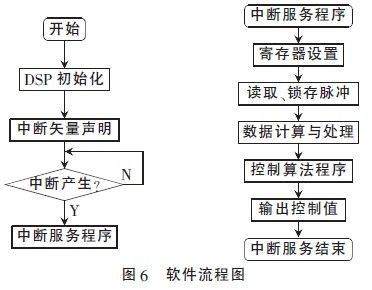
系统的软件调试与开发均采用针对TMS320F28335的CCSV3.3版本。TI公司为用户提供的软件开发工具CCS(Code Composer Studio)提供了可视化窗口,将所有代码生成工具集成在一起,用户的一切开发过程都在CCS中进行,包括项目建立、源程序的编辑、程序的编译和调试,此外,CCS还提供了实时操作系统DSP/BIOS,极大地方便了调试和开发。本系统的DSP程序主要分为主程序和中断服务程序两个模块。主程序模块[10]主要实现各个功能模块的初始化、内存变量的定义和中断矢量的声明等工作。中断程序模块主要实现相关寄存器的设置、读取和锁存eQEP模块的脉冲计数、检测电路的反馈以及控制算法的程序等工作,其软件流程如图6所示。
本文提出了稳定平台伺服系统的设计,利用DSP芯片TMS320F28335的eQEP模块对光电编码器的脉冲信号进行解码和计数,求得伺服电机的角度和速度信息,从而与上位机给定值进行比较,通过调节算法使D/A模块产生电压信号对伺服电机进行速度控制。研究表明,该设计具有较高的响应速度、稳定精度和较强的抗负载扰动能力,充分实现了稳定平台的高精度控制。同时,该系统具有较强的鲁棒性和自适应能力,验证了该方案的有效性,并为不同控制领域提供了高性能的数字解决方案。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码