基于svpwm变频调速的双电机控制算法应用
4.系统仿真结果分析
系统中电机选用交流永磁同步电机(PMSM),通过simulink对本文中的模型进行仿真实验。
在系统matlab7.1中,使用的电机模型的主要参数为:定子电阻Rs=0.0918Ω,交直轴定子电感Ld=Lq=0.000975H,转子磁场磁通λ=0.1688Wb,转动惯量J=0.003945kg·㎡,粘滞摩擦系数B=0.0004924N·m·s,极对数P=4.
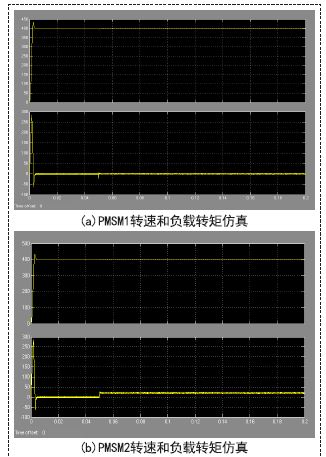
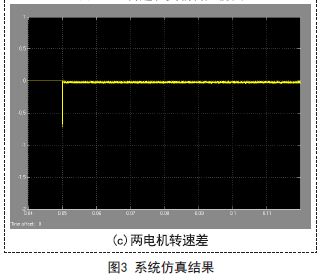
将电机转速设定为400r/min,让电机进行零负载启动。设定仿真时间为0.2s,为了验证负载改变对系统产生的影响和双电机的跟随性能,在t=0.05s时,给PMSM2突加一个TM=20N·m的负载转矩。仿真图形如图3所示。
由图3可以看出电机在启动后很快达到稳定状态,转子的转速稳定到400r/min.当电机PMSM2突加负载转矩后,PMSM2转速经过短暂的下降后快速达到稳定,转矩恒定在20N·m.
PMSM1转速受到PMSM2负载改变的影响,出现微小的下降,然后快速恢复稳定,转矩也出现微小的波动后迅速恢复稳定。说明基于svpwm调速的PID双闭环控制系统有较强的鲁棒性,双电机间偏差耦合补偿策略当某一电机负载改变时,另一个电机有良好的跟随性能。
5.结束语
系统在采用偏差耦合控制策略的基础上加入PID控制补偿器,使系统能够很好的实现同步控制。每台电机都采用专门的控制器和速度补偿模块,通过svpwm方式对电机进行调速,并采用电流环与速度环的双闭环控制,即每台电机及其控制器组成一个闭环系统,各子系统之间通过速度补偿模块进行耦合,形成完整的控制系统,增强了系统的抗干扰性。仿真结果表明,基于svpwm的PID双闭环系统具有超调量小、响应迅速、鲁棒性强等特点,而加入偏差耦合控制策略的双电机控制系统具有良好的同步性。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码