DIY一款具运动状态追踪功能的遥控玩具,做守护天使
3.3系统软件架构
软件系统分为四个模块:
(1)通讯模块实现对无线通讯模块的传感信号的收发;
(2)运动模块实现对电机、电调的驱动,使电机按照指定的方向和速率转动,实现对飞机的控制;
(3)运动控制模块,通过参考当前的运动状态,通过选择合适的运动控制算法,控制电机的运动状态进而控制飞机的运动状态;
(4)主模块,通过合理的算法和调用,实现各个子模块之间的配合,完成系统的功能,满足系统的要求。
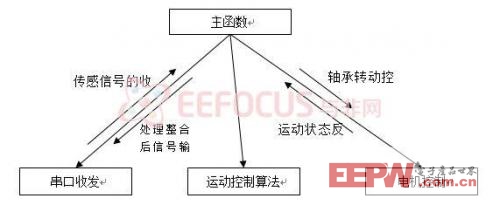
图6 软件系统各子模块
3.4 系统软件流程
3.4.1通讯系统软件系统框架设计
根据STM32F103RE处理器特点,本系统采用ZigBee模块作为无线接收器,串口对无线收发模块收一发状态转换的控制。处理器控制信号流程图如图 7所示。
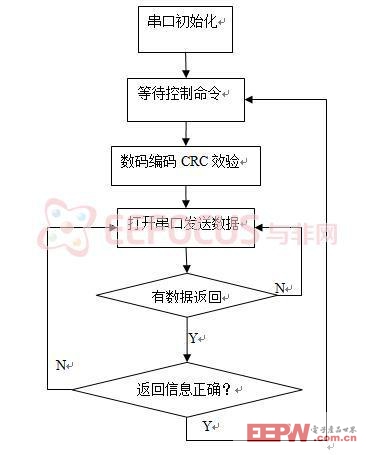
图7 处理器控制信号流程图
3.4.2 轨迹计算流程图
轨迹计算总流程如图8所示,首先由MCU调用轨迹计算子程序,在子程序中判断该时刻是否为初始时刻,若该时刻为初始时刻则将速度和位移初始化;若该时刻为非零T时刻,则通过一定的数据处理算法以及T-1时刻的速度和位移数据来获得T时刻的速度和位移。
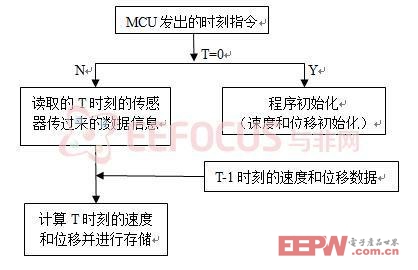
图8 轨迹计算流程图

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码