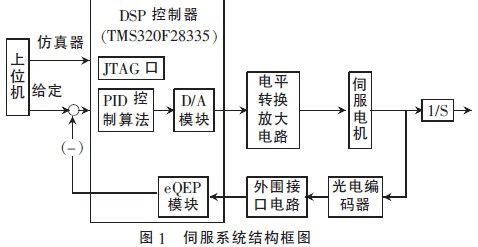
伺服系统在横切机电气改造中的解决方案
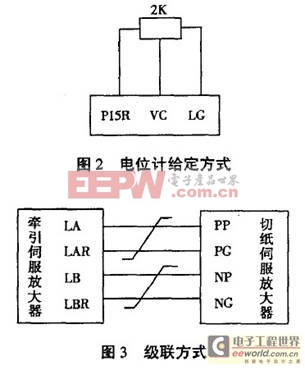
(2)切刀伺服系统采用位置控制方式,与牵引伺服系统采取级联的控制方式,即切刀伺服系统跟随牵引伺服系统。该控制方式可以准确的使两套系统速度同步。其接线方式如图3所示。
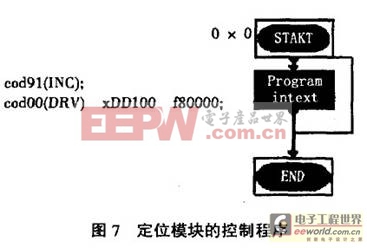
(3)微调伺服系统的控制方式是由PIE经过计算,把需要的脉冲数传给定位模块,再由定位模块发出脉冲指令给微调伺服放大器,从而来控制微调伺服电机的运转。定位模块发出的是脉冲串 符号的方式,如图4所示,因此微调伺服放大器也需要相应的设置来接受定位模块的脉冲指令。

4 控制系统的软件设计
控制系统的软件包括PLC的控制程序、定位模块的控制程序和触摸屏操作终端的监控系统,前者执行实时控制任务,后者实现人机交互功能。
(1)PLC控制程序
它由数据采样,数据运算,数据处理,控制信号处理等程序构成。如图5所示。
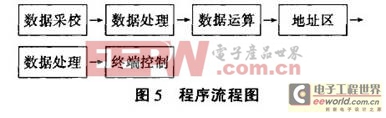
①数据采样:程序在采集码克传感器信号的同时采集编码器的信号,以判断切刀的当前位置的偏差。
②数据运算和数据处理:为了精确的控制切纸精度、配合终端显示,对数据区中的数据进行处理,运用加、减、乘、除等多种运算方法。对切刀的位置偏差进行补端。同时也控制伺服系统的一些控制信号。
补偿脉冲程序如图6所示。

(2)定位模块的控制程序(如图7所示)
(3)监控程序
监控软件设计是由一组画面组成,本系统除了设计有动态模拟设备当前运行画面、I/0状态显示画面、故障显示画面、故障查询画面,还设计有控制与操作画面,可以从触摸屏直接输入纸张的给定长度,同时也可以显示微调电机所需的给定脉冲。静态图形的设计采用绘制软件提供的通用控件,如:线条、文本框等进行绘制。动态图形设计,通过传感器采集的数据和PIE的处理来随着变化,实现数据与图形的动态连接,监控画面运行时,图形属性随时数据改变而变化。
(4)伺服放大器参数设定
牵引伺服电机采用速度控制方式,切刀和微调伺服电机采用位置控制方式,各电机根据需要相应地设置其电子齿轮比及加减速时间等。
5 运行结果
本系统安装调试完毕投运后,该系统运行稳定,自动化程度高,控制精度满足了生产的要求。同时也减少了电气故障的发生率,取得了明显的经济效益。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码