电机逆变器死区补偿独领风骚高性能伺服不在话下
因此,在忽略功率开关引起的高频噪声的情况下,逆变器的输出电压为:
其中,ma调制度,为调制正弦波幅值与三角波载波幅值的比值。
由上式可知,由于逆变器死区时间的存在,不但使逆变器输出电压的基波发生变化,而且使输出电压中含有3次、5次、7次等高次谐波。
开关死区造成逆变器输出电压波形发生畸变,导致输出电流波形波形畸变,即电流的交越失真。
·死区时间越长,逆变器输出基波电压损失越大,电压波形畸变程度越大;负载基波电流幅值下降越多,电流波形畸变也越严重。
·对于确定的死区时间,负载功率因数变小时,会使逆变器输出基波电压幅值增加,电压波形畸变率变小,基波电流幅值减小,电流波形畸变率变大。
·当输出电压较低时,空间电压矢量幅值很小,三路桥臂相对导通时间变短,死区时间的影响变大。
·死区不仅影响输出电压幅值,还影响其相位;死区使pwm波形不再对称于中心,因此,空间电压矢量的幅值产生偏差,相位也发生变化。 基于位置的动态死区补偿方法
各种死区补偿方法的一个共同特点是根据电流波形补偿电压信号。因此需要检测实际电流值,判断各相电流正负,以其过零点作为补偿电压信号的切换时刻。电流检测环节由电流传感器、低通滤波器和a/d转换组成,为减小噪声程序中还需加数字滤波。检测到的电流存在器件精度和干扰造成的误差,且有相位延迟。因此利用实际检测到的电流信号很难精确补偿死区影响,甚至会由于过零点附近的错误补偿造成更大的电流畸变。
现今pmsm的转矩控制多是通过矢量控制实现的,为准确控制电机电流,其电流环响应频率很高,可达到1khz以上,实际电流能够精确跟踪电流指令信号。在高精度的交流伺服系统中,为实现高精度的位置伺服控制需要高分辨率的位置传感器,一般达到16或17位,而高速高精度a/d器件相对成本较高,其分辨率一般为10或12位。由于电流矢量和转子位置相关,如果用位置信号判断电流正负,施加电压死区补偿信号,补偿的精度可以比实际使用的电流信号精度高,且不受干扰信号的影响。
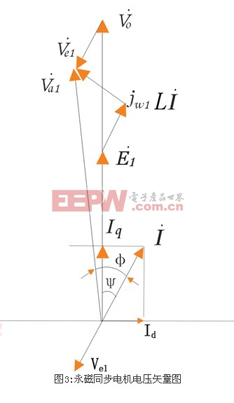
由pmsm矢量图可见,磁场定向控制的电流矢量与转子磁极成90°(电角度),并与转子同步旋转。转子磁极的位置可通过高分辨率的编码器确定,经过转子磁场定向控制,电流按时间变化的电角度和磁极空间变化的空间旋转角度重合,进而可得到电流矢量的空间位置。根据电流矢量的空间位置,可以判断出各相电流的过零点。
磁极的位置角度与电流的相位关系固定,经过分析,我们按如下的位置变化规律进行电压补偿:
·当角度0《θ《π时,ia》0,a相补偿正向电压;反之补偿反向电压。
·当角度2π/3《θ《5π/3时, ib》0,b相补偿正向电压;反之补偿反向电压。
·当角度-2π/3《θ《π/3时, ic》0,c相补偿正向电压;反之补偿反向电压。
补偿电压的幅值计算公式为:

其中factor为调整系数,一般取为0.7。
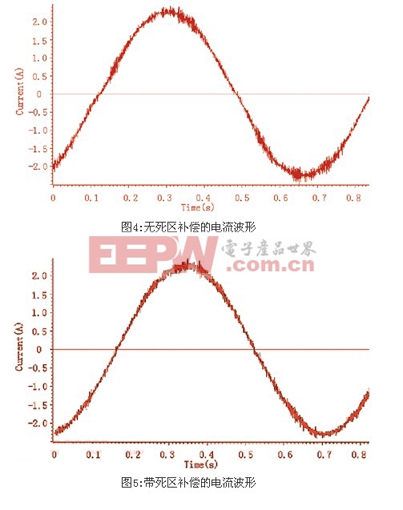
图4和图5为没有加死区补偿和加死区补偿的实验结果比较。由电流波形可以看出,无死区补偿的电流在过零点处产生畸变,
有平的台阶。而加入以上提出的死区补偿方法后,图5所示实际电流跟踪给定电流,得到了效果很好的正弦波形。
逆变器的开关死区效应对交流伺服系统的性能具有较大的影响,因此对开关死区进行校正补偿是必要的。本文在分析了各种死区补偿方法的基础上,提出了一
关键词: 电机逆变器

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码