改进型PID神经元控制算法在APF控制中的应用
控制器进行控制,kp设置为0.5,kI设置为0.01,参考电容电压为1000V,运行程序后,其补偿后的电流仿真波形如图2所示。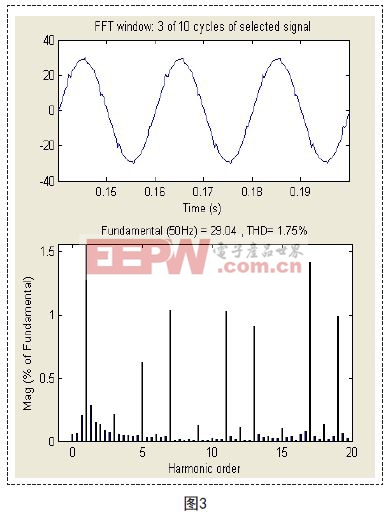
可以看到,补偿后的电流稳定后谐波占有率为5.64%,效果一般。
利用MATLAB的M文件,将提出的改进算法编写好,将SIMULINK控制模块代替PI控制器,其中K值设置为0.1.运行程序,结果如图3所示。
由此可见,提出的改进的算法在并联型APF中应用后,取得了较好的补偿效果,其补偿后电流谐波占有率降低到1.75%,比PI控制器的控制效果有了显着地提高。
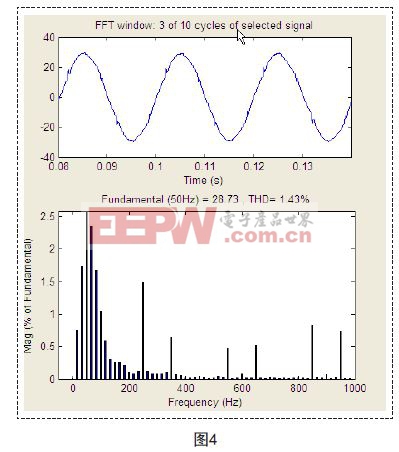
最后应用本文所提出的改进算法,同样将K值设置为0.1,运行程序,结果如图4所示。
由以上仿真结果可以看出,补偿后电流谐波占有率降低到1.43%,由此可见,本文所提出的改进算法在APF的应用中,其应用效果优于其他的控制算法。
5.结论
本文将位置式PID控制算法与单神经元自适应PID控制算法相结合,对输出表达式进行修改,得出新的改进型PID神经元控制算法,该算法经过仿真,在并联型APF中应用中,与传统PI控制器及PID神经元控制算法相比较,取得了更好的补偿效果。近年来,随着控制技术的不断发展,神经元PID控制技术[4]发展较快,其在APF研究领域中也将逐步得到更加广泛的应用,本文所提出的改进算法,收敛速度快,精度高,具有一定的实用意义。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码