ZigBee的远程低功耗灌溉控制系统设计
2.3 电磁阀驱动电路
由于CC2530的驱动电路很小,不能驱动电磁阀里面的电机,使电磁阀关断,所以必须在CC2530的I/O和电机之间加上驱动电路来驱动电机,其电路图如图4所示。

J2接电磁阀的输入端,L7010为电机驱动模块,其工作电压最低可以达到1.8 V,持续驱动电流达1 A,尖峰工作电流可以达到2 A,并且可以方便地控制电机的正反转,其中VM为电机电源,VCC为芯片电源。
3 系统软件设计
3.1 系统控制协议设计
3.1.1 上位机向下位机发送控制消息
由于上位机发送指令时,是通过手机短信发送出去的,并且由于垃圾短信的存在,终端难免会收到一些和控制无关的指令,因此当解析短信中的控制指令时,必然会使一些短信无法解析或者解析出错误的控制信息。不能解析出控制指令会使程序出现运行错误,使整个系统瘫痪;而解析出错误的控制指令将使电磁阀出现误动作,影响控制效果。因此,为了保证系统的安全性和健壮性,必须设计相应的协议。为了区分控制信息和非控制信息,必须有一个标志来加以区分,本文采用一个字节表示消息类型。每一个节点有4个电磁阀,所以采用一个字节可以描述一个电磁阀的控制信息。为了减少终端的控制和命令解析的难度,将此字节的剩下4位作为每一个电磁阀有无控制信息的标志。如果每一个节点都单独发送一条控制短信,必然会加重系统的负担,使电能消耗增加,所以本系统将所有节点的控制组合在一条短信中发送出去。其消息结构如下所示。

消息类型域,其长度为1个字节。应用中设置成表1消息类型域,其长度为1个字节。应用中设置成表1中的某值。
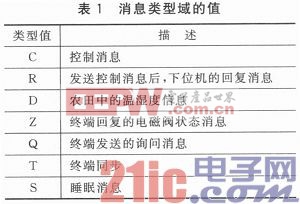
控制消息域,其长度根据具体农田里的终端个数决定,一个终端采用一个字节,其中每两位为一个电磁阀的控制信息,应用中应设置成表2所列的值。

3.1.2 下位机向上位机发送数据消息
上位机向下位机发送控制指令后,下位机将会向上位机发送相应的回复信息,以告诉上位机下位机对所发送指令的执行情况,这种信息包括两类:第一类是上位机发送完控制指令后,下位机收到指令的一个确认状态回复,其消息类型值见表1;第二类消息是下位机对上位机发送的控制指令执行后的电磁阀信息,电磁阀的状态信息格式如下。
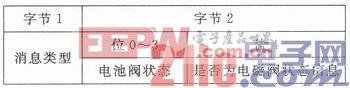
其消息类型见表1。字节2以后的字节表示电池阀的状态,每一个字节表示一个终端节点,其中低4位为电磁阀状态。由于ZigBee协调器节点可能没有收到终端采集到的电磁阀状态数据,所以用第4位来表示低4位是否为电磁阀状态,1为是,0为不是。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码