基于STM32的半导体激光光源驱动器的设计方案
MAX1968主要由两个开关型同步降压稳压器组成,在两个同步降压稳压器输出端配有高效MOSFET,由LX1、LX2引出,经过LC滤波驱动TEC.两个稳压器同时工作产生一个差动电压,直接控制TEC电流,实现TEC电流的双向控制,双极性工作避免了线性驱动所存在的“死区”问题,以及轻载电流时的非线性题目,能够实现无“死区”温度控制。
外部控制电路的输出电压加在TEC电流控制输进端CTL1,直接设置TEC电流。一般TEC+接OS2,TEC-接OS1,OS1和OS2不是功率输出,而是用来感测通过TEC的电流,流过TEC的电流由下式确定:

式中:RSENSE为TEC电流的感应电阻;VCTL1为外部控制电路的输出电压;VREF为参考电压(1.5V)。
假设正向电流为加热,则VCTL1>1.5V为加热,电流的流向从OS2到OS1,OS1、OS2、CS这3个引脚的电压关系为:VOS2>VOS1>VCS,反之则制冷。开关稳压器是按周期运作的,以把功率传输到一个输出端,这种转换方法会在基频及谐波上产生很大的噪声分量,但是在MAX1968中是相位转换并提供互补同相工作周期,所以纹波波形大大减小,抑制了纹波电流和电气噪声进进TEC模块,进而影响LD工作性能。FREQ用来设置内部振荡器的开关频率,当FREQ接地频率为500kHz时,FREQ接电源频率为1MHz.MAX1968片内带有的MOSFET驱动器,减少了外部元件,芯片工作在较高的开关频率下,可以用更小的电感和电容,从而减少PCB(印制电路板)的面积、降低本钱,对于实现激光器的小型化与智能化具有极其重要的作用。利用MAX1968设计出的温控系统如图3所示:

1.3 电流驱动保护模块
实际操作中,电流难免会出现波动,而这种波动在某种程度上会严重影响半导体激光器的性能,严重时甚至会烧坏半导体激光器。因此在该激光驱动器的电路中设计了一个电流驱动保护模块。如图4所示。这个电流驱动保护模块主要由一个稳压二极管D6,瞬变二极管D7和电阻R29构成。其中D7的主要作用是防止反向瞬变电压的冲击,即当半导体激光器的两端电压发生突变时,半导体激光器两端的电压的变化不会太大。R29的作用是防止半导体激光器的两端出现静电。
如果系统中半导体激光器的两端出现静电,那么存在的静电将会流过R29的两端,这样可以保证对于半导体激光器不会产生影响。
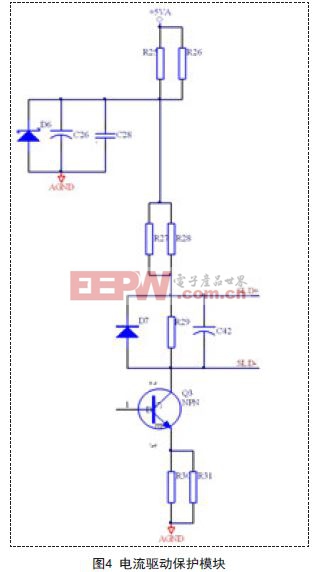
D6稳压二极管的作用则是稳定半导体激光器两端的电压。由图可知,当电压超出预定电压时,稳压二极管将会被击穿,电流会直接经过稳压管所在的支路直接接地,而不会经过半导体激光器所在的支路,这样可以对半导体激光器起到稳压与保护的作用。
2.软件系统设计
2.1 模糊PID算法设计
一般控制过程存在不同程度地非线性、大滞后、参数时变性和模型不确定性,因而普通的PID控制器难以获得满意的控制效果。
系统采用模糊控制与PID控制器相结合构成模糊PID控制器。模糊控制是以人的思维判断方法形成模糊控制规则,在模糊规则的基础上以模糊量作为实际控制的依据。利用模糊控制给PID控制器在线自根据PID参数自整定原则,其结构框图如图5所示。

该模糊控制器以采集到真实值out Y 与理想值in R 之间的偏差值E和偏差变化率EC为输入变量,以PID的参数P K 、I K 和D K 为输出变量。通过控制参数p K 、I K 和D K 的调节可对控制效果进行调整,最佳的p K 、I K 、D K 值需要根据实验进行选择。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码