双天线GPS/SINS组合导航系统设计
编者按:本系统作为浅组合导航系统的一种,利用了双天线定向GPS与光纤陀螺的组合,以基于DSP+FPGA多处理器结构作为导航计算机平台,在原有的位置与速度基础上加入了姿态作为第三个量测量,应用卡尔曼滤波算法将GPS姿态信息作为对惯性导航系统数据的初始值和修正。设计的系统通过跑车实验验证后表明达到了设计要求,具有实时性好,运算精度高等优点。
卡尔曼滤波算法
本文采用卡尔曼滤波算法对GPS,IMU数据进行融合。将式(1)(8)离散化后方程为:
试验结果
为了验证本文提出的双天线GPS/SINS组合导航系统的可行性,在南京某地进行了跑车实验。其中姿态GPS模块定位精度小于5m,速度精度0.1m/s,航向精度0.1°。IMU常值漂移小于0.1°/h。跑车过程中以高精度GPS作为真实值,将组合导航系统输出值与高精度GPS数据进行比较。整个系统中每5ms进行一次惯导数据解算,通过卡尔曼滤波算法进行数据修正的频率为1次/s。将跑车过程中导航计算机输出数据存入文件,通过MATLAB进行数据处理。图3中给出一次跑车中组合导航系统与高精度GPS同一时刻输出数据的差值,结果如图3所示。
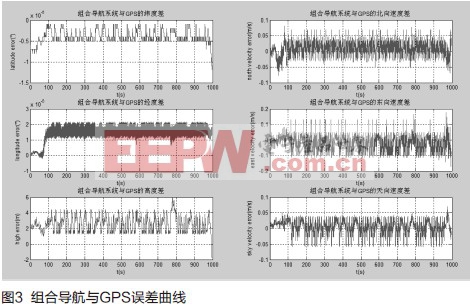
从图3可以看出,在动态情况下本文提出的组合导航系统具有较高的定位精度,从与高精度GPS数据对比中可以看,此系统定位误差在4m以内,而速度误差在0.1m/s左右,达到了系统的要求,充分满足了实际应用需求。
参考文献:
[1] Li Y, Zhang K, Roberts C , Murata M. On-the-fly GPS-based Attitude Determination Using Single-and Double-differenced Carrier Phase Measurements[J]. Springer_GPS Solutions,,2004,Volume 8, Number 2,(10):93-102
[2] 付梦印.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003:104-115,132-135
[3] 何晓峰,胡小平.基于SINS/GPS组合的低成本船用姿态确定系统[J].中国惯性技术学报.2004,12,(05):21-25
[4] 王惠南.GPS导航原理与应用[M].北京:科学出版社,2003:33-41
[5] Yanjuan Yang, Weifeng Tian, Zhihua Jin. Study on a Novel Marine INS/GPS Integrated Navigation Technology. IEEE Seventh International Conference on Control, Automation , Robotics and Vision 2002, Volume: 3 [C]:1563-1567

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
